組み込みシステム設計者のためのLIN2.0マイコン実装術(後編) ――スレーブ・ノード用ドライバ・ソフトウェア開発のポイント
1.ノードの構成と状態遷移
今回,ノードの開発に使用したのは,NECエレクトロニクスの8ビット・マイコン「μPD78F8006」(78K0/Kx1,Kx2シリーズ)です.UARTにLINのブレーク送受信を行う回路が含まれています(図3).また,LIN仕様に適合した回線ドライバ回路も内蔵しているため,写真1のように小さなノード基板を作ることができます.
本稿では,ブレーク受信について,専用回路を使わない方法も記載します.ほかのマイコンを利用する場合は機能名などを随時読み替えて参照してください.
図3 LIN受信操作用ポートの構成(概略図)
ポート入力切り替え制御によって,マイコンの端子を結線することなく,受信ポート(RxD6)の入力データを外部割り込み(INTP0)や16ビット・タイマ/イベント・カウンタ(TI000)へ接続できる.
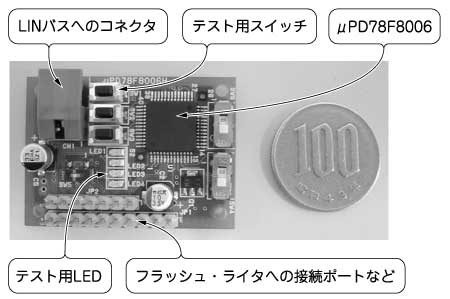
写真1 LINスレーブ・ノード基板の例


