最終打ち上げ報告(その1)からかなり時間が経ってしまいましたが、今回は「MWM」の報告を紹介します。
MWM
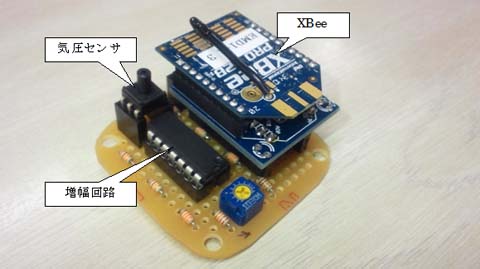
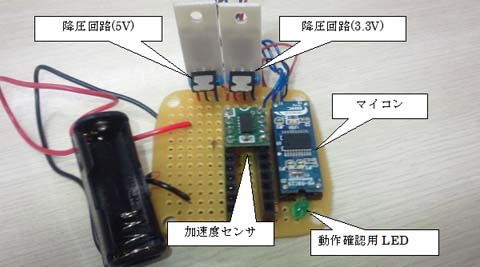
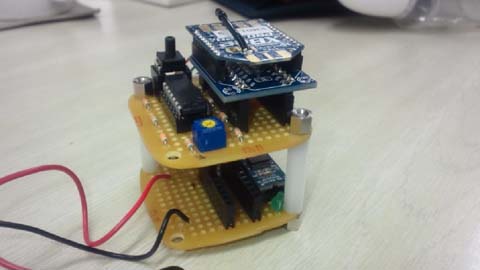
機器構成:ハードウェア
| CPU | R8C29 |
| ロケット | Baby Bertha (EST 1261) |
| 加速度センサ | Freescale MMA7361L |
| 無線通信モジュール | XBee-Pro |
| エンジン | C6-5 |
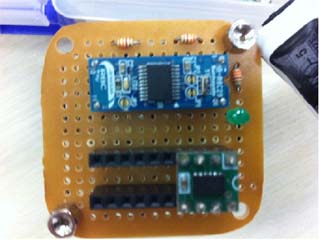
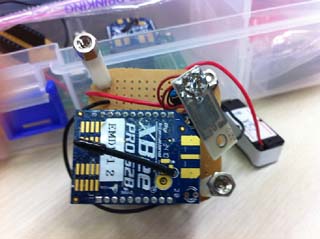
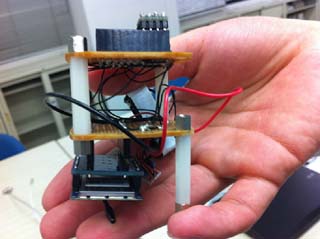
ユニバーサルボードでアクロバティックに作成されていますねぇ...

[制限事項]
- ボーレート:115200bps
- 通信可能距離:約140m
- 電源電圧:3.3V
- マイコンの処理は、PCからの処理開始コマンド受信から処理停止コマンドコマンド受信までとする
- ノーズコーン(ペイロード含む)とロケット本体の重さは113g
[機能]
ペイロードをロケットに搭載し打ち上げ、取得した加速度データを地上に送信する。
地上では送られてくるデータをXBeeで受信する。
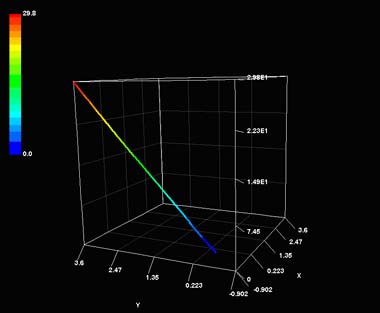
2回の打ち上げを行い、見事データ取得に成功しました。
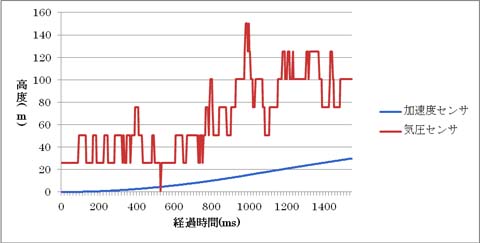
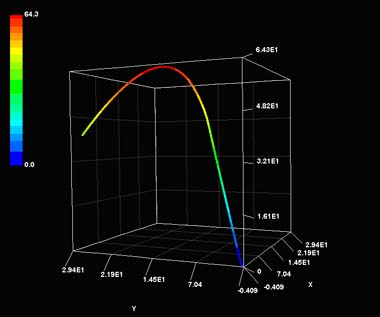
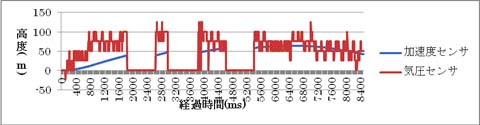
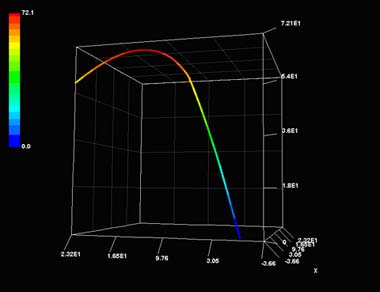
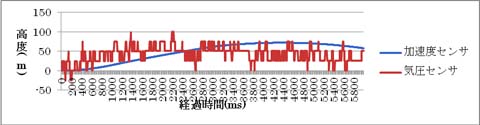
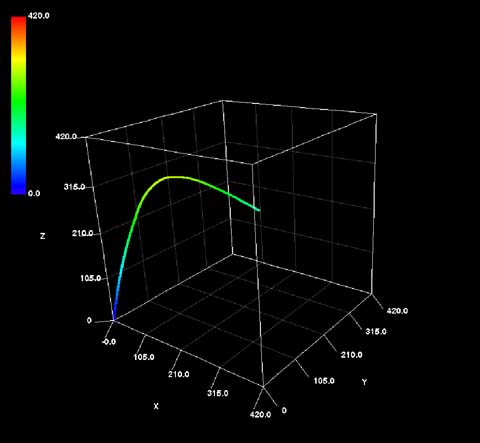
そのデータが以下です。
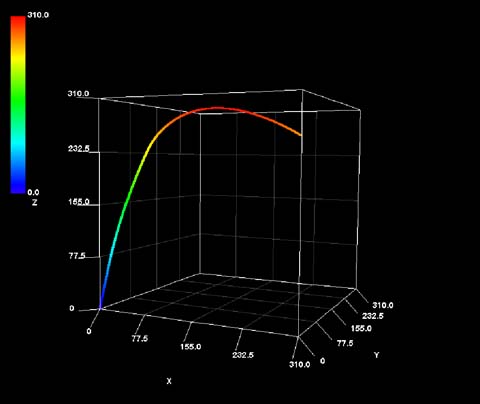
あれ?
高度が余裕で300mを超えています。これ航空法に違反してる?
と思ったら、計測データのミスだったようです。
[チームからのコメント]
ロケットが最頂点に達した後、落下中も先頭が下向きになってしまったため、加速度センサが+軸方向の加速度を検知し続けてしまったためと考えられます。
落下中のロケットの姿勢を保てなかったのは、ノーズコーンの歪みや重さも原因であると考えています(ロケット画像を参照)。
正しくデータを取得するためには、搭載するハードウェアだけでなく、飛行体への影響や負荷を考慮し、さまざまな状況を想定しておく必要があると感じました。
[Hamana8に参加しての感想]
初めて基盤作成から行ったため、効率の良い手順など分からないことも多く、苦戦しました。
例えば、作成した基盤の通電確認をした際に、付けがあまく、やり直し等が何度かありました。
ソフトについては、「マニュアルを読んで、理解・設計が出来ること」を目標に進め、メンバー全員が達成できたと思います。
プロトタイプを作成中に、シリアル送信処理が上手くいかず、試行錯誤しながらも協力して解決できた時に達成感を得ることができました。
今回の処理に最適なメインクロックを考慮したり、処理内容から制御に適したプログラム構成を練っていく過程で、愛着を持ったり楽しさを感じました。
今回のHAMANA-8では、試射会を1度しか行うことが出来ず、マイコンを乗せて一度も試射を行っていないというあきらかなテスト不足のまま本番に臨むことになってしまいましたが、準備をしっかりと行い、本番では期待以上に上手くデータを取得することが出来ました。
各自が責任を持って取り組み、考え得る準備をしっかりと行えばそれに準じた結果が得られ、
自信にも繋がったと思います。
そういった面でも、得るものが多く、今後に繋がる体験だったと思います。

次回は「ブラック」の紹介をします。