車載マルチメディア・ネットワーク「MOST」の設計ノウハウ ──ロバスト性の高いシステムを構築するためのハード/ソフト開発術
○● COLUMN 2-2 ●○
2)メッセージの送信
MOSTネットワーク上の開発途中またはデバッグ中の装置に制御メッセージを送りたいということがあると思います.この場合,「MOST
Sender」を用いて制御メッセージを送信します.図B-2のような簡単なコントロール・パネルを作ることもできるので,デバッグや装置の機能検証に役立ちます.
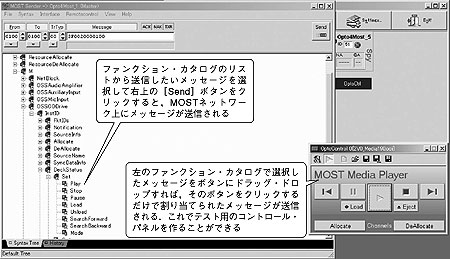
〔図B-2〕メッセージの送信
送信元アドレス,送信先アドレス,メッセージ・タイプ,メッセージなどを指定して[Send]ボタンをクリックすると,MOSTネットワーク上に制御メッセージが送信される.メッセージは16進データで直接指定することも可能だが,ファンクション・カタログからメッセージを選択して送信することもできる.
3)メッセージの記録
メッセージの履歴をとる場合には「MOST Recorder」を利用します.MOSTネットワーク上の制御チャネルのデータを取り込み,ファイルにセーブします.記録の開始・終了はそれぞれマニュアルで指示することができます.また,トリガを設定すれば,特定の送信元,送信先,あるいはメッセージのタイプの受信を基準にしてそれらを指示することもできます.
4)メッセージの表示
MOSTネットワーク上の制御チャネルのデータを確認する場合には「MOST Viewer」を使用します(図B-3).このビューワにはメッセージのタイム・スタンプ,送信元アドレス,送信先アドレス,メッセージの16進データ,逆アセンブルされたメッセージなどが出力されます.さらに,MOSTネットワーク上のメッセージをリアルタイムに確認したり,MOST Recorderでセーブした記録ファイルを表示するときにもこのビューワを利用します.
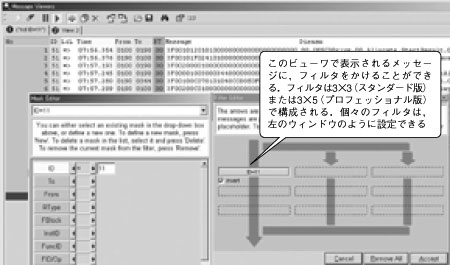
〔図B-3〕 メッセージの表示
制御メッセージは,リンク状態,タイム・スタンプ,転送元アドレス,転送先アドレスなどの情報とともに表示される.メッセージの内容は16進データと逆アセンブルされたメッセージとして表示される.このビューワの表示内容や項目はカスタマイズできる.
5)タイミング解析
制御チャネルのバス負荷やあるイベント(メッセージ)から別のイベント(メッセージ)までの応答時間,およびインターバルは,「MOST Timing」が出力するグラフやヒストグラムを使って確認します.制御チャネルのバス負荷は,単位時間当たりの制御メッセージ数として確認できます.
〔図B-2〕メッセージの送信 送信元アドレス,送信先アドレス,メッセージ・タイプ,メッセージなどを指定して[Send]ボタンをクリックすると,MOSTネットワーク上に制御メッセージが送信される.メッセージは16進データで直接指定することも可能だが,ファンクション・カタログからメッセージを選択して送信することもできる.


