メカトロ・システム機器の進化には分散処理が欠かせない ――ロボットに学ぶ分散処理の基本概念と課題
● 人とコミュニケーションする双腕ロボット
次に,人間との音声による会話や身振り手振りを使い,円滑な意思疎通のもとに目標タスクを実現するロボット(写真2)の事例を紹介します.このロボットは,図6に示すように,2
台のカメラとスピーカの付いた頭部,4本指を持つ双腕が支柱に固定されており,全部で49の運動自由度で構成されています.このロボットの基本的な作業として,人間との会話に基づいた物体の保持や運搬を想定しています.
「こんにちは」,「元気ですか?」などの問いかけには返事をし,「クイズを出してください」などと頼むと,三者択一のクイズを出題します.クイズに正解した場合には,机の上に並べてあるカプセルのうち,どれが欲しいかを尋ね,会話者の答えた色のカプセルを画像認識によって探し出し,それをつかんで渡すという動作を行います.
これらの動作を行うためにロボットは,音声認識,音声合成,画像認識,ヘッド制御,アーム制御,ハンド制御機能を持つ必要があります.そして,これら複数の機能を分散処理するために,複数のコンピュータとそれらを統合する1台のサーバでロボットの制御系を構成しています.
図6にはロボットの分散処理システムを示しています.本ロボットは,「一つ,あるいは複数のハードウェアを制御するためのコントローラ」としての機能を持つコンピュータをネットワークに接続し,サーバとなるコンピュータに対して,立ち上げた各モジュールを管理するスレッドを利用することで動作命令やタイミングを取得します.
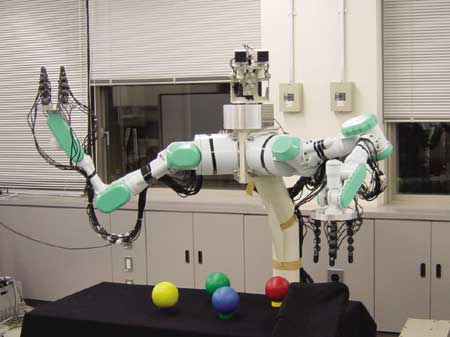
写真2 音声による指示で動作する双腕ロボット
2台のカメラとスピーカが付いた頭部と,4本の指を持つ双腕が支柱に固定され,全部で49の運動自由度で構成されている.写真は,独立行政法人理化学研究所提供.
図6 音声による指示で動作する双腕ロボットの分散処理系
点線で囲んだ部分がアーム制御モジュールに相当する.


