メカトロ・システム機器の進化には分散処理が欠かせない ――ロボットに学ぶ分散処理の基本概念と課題
5.ロボットの開発事例
分散処理を行うロボットの開発事例を二つ紹介します.
● 構造に適した歩行を自動的に決める多脚歩行ロボット
一つ目は,モジュール構造をもつ多脚歩行ロボットです.図5と写真1に示す階層型分散歩行制御方式で制御されるこのロボットは,各モジュールに自脚の運動を制御する制御装置とソフトウェアを備えています.上位制御器からの情報をもとに,隣接する足との局所通信で互いに特定の位相差で動かし,結果として調和のとれた歩行が実現され,ロボット本体が移動します.
また,ロボット本体には,外部環境に対する認識処理に基づいて本体の移動方向を計画し,すべての脚モジュールにブロードキャスタ方式で同一指令を知らせるだけで,モジュールが自律的に動作を決定し,歩行が行われます.このため,上位制御器は各脚の動作を個別に計算する必要がなく,環境を認識することによって機敏に歩行の方向変更を決定できます.また,写真1に示すように,各脚の結合構造が変わっても,各モジュールに手を加えることなく新しい結合構造に適した歩行を実現できます.
図5 多脚歩行ロボットの階層型分散制御
上位制御器では,環境状況に対する認識や人間による運動指令で運動計画を立て,下位制御器にブロードキャスタ方式で同一指令を知らせる.これに基づいて,下位では隣接する脚の間に位相差を作り出し,結果として調和のとれた多脚歩行が実現される.
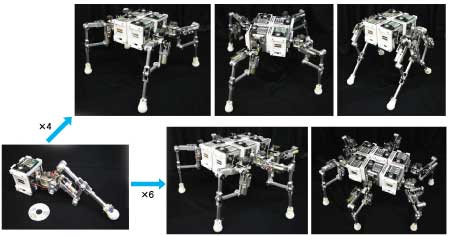
写真1(6) モジュール構造をもつ多脚歩行ロボット
機構,センサ,計測制御回路,計測・制御・通信用ソフトウェアを一体化したモジュールによる多脚歩行ロボット.各脚の間の結合構造が変わっても,各モジュールに変更を加えることなく新しい結合構造に適した歩行を実現できる.写真は,独立行政法人理化学研究所 バイオ・ミメティックコントロール研究センター 小田島 正氏提供.


