組み込みシステム制約とそれに対するアプローチ ―― 模型ロケットに観測システムを組み込んだ「Hamana-5」プロジェクトに学ぶ
●気温が計測できない
「両刀使い」が取得した気温データは,ノイズのような波形はあるものの,全く変化していません(図9).同チームの中では,この原因は最後まで分かりませんでした.
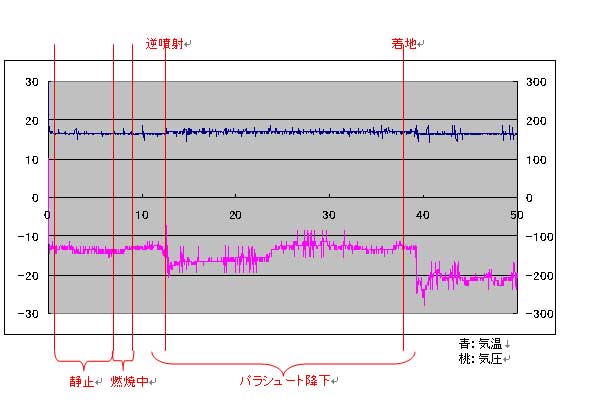
[図9] 「両刀使い」の取得データ *クリックすると画像が拡大します.
しかし,この原因はハードウェア構成図(図1)をじーっと眺めていると見えてきます.このチームが使用した温度センサは,加速度センサに内蔵されている温度センサでした.この温度センサは,加速度情報が温度によって変化するため,その補正に使用するためのもので,加速度センサ内部の温度を測定しています.つまり,このセンサは,測定したかった外気温ではなく,加速度センサの温度を測定していたのです.
温度を測定するときは,測定対象物にセンサが直接触れる必要があります.よって,この温度センサを使うという選択そのものがトラブルの原因だったということになります.
なお,Hamanaプロジェクトの場合,ロケットの飛翔に合わせて非常に短い時間で温度変化を測定しなければなりません.そのため,温度センサを選定する際には,温度変化に対する追従性を十分に考慮する必要があります.
●気圧が計測できない
同チームが取得した気圧データも,なにやらおかしな動きをしています(図9).正常に取得できていれば,ロケットの高度が上がるに従って気圧が下がり,降りてくるに従って気圧が上がるはずです.しかし,上昇中(燃焼中~パラシュートが開くまで)は全く変化がなく,パラシュートを開くための逆噴射で気圧が低くなり,その後,着地でさらに低い値に変化しています.
これも,チームの中では原因が分からず,対策できなかった現象でしたが,外部からの衝撃などによってデータが変化していることから考えると,センサ自体の破損か,接触不良の可能性を疑うことができます.
実際にペイロードを分解してみたところ,基板間を接続するコネクタにはんだがついていました(写真9).この基板間を接続するコネクタは金メッキされていて接触性に優れているのですが,ピンにはんだが付着していることによって,接触不良を起こしやすくなります.はんだ付けの際には,コネクタのピンにはんだが付着しないよう,十分な注意が必要です.
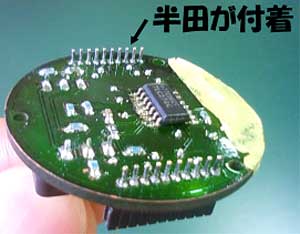
[写真9] 半田の付着したコネクタ


