組み込みシステム制約とそれに対するアプローチ ―― 模型ロケットに観測システムを組み込んだ「Hamana-5」プロジェクトに学ぶ
●安定動作しない
発射前にはペイロードが正常に動作しているにもかかわらず,着地して回収すると,途中でリスタートしたとしか思えない状態になっていたという現象が起こりました.しかし,ロケットに搭載せずに動作させているときには,この現象は全く起こりません.
飛行中の入力データの変化によって発生するソフトウェアの不具合ではないかと考え,ソフトウェアの検証を行いましたが,原因が見つかりません.ああでもない,こうでもないとソフトウェア/ハードウェアを調査するうちに,一つの結論に達しました.
原因は,バッテリ・ホルダだったのです.乾電池を接続するために乾電池をバッテリ・ホルダに入れ,バッテリ・ホルダからケーブルでペイロードに接続していましたが,このバッテリ・ホルダ内の乾電池が打ち上げの衝撃で一瞬,接触不良を起こしていたのです.乾電池を直接はんだ付けすることで,この現象はすっかりなくなりました注3.
注3:バッテリ・メーカからは,乾電池に直接はんだ付けなどをしないように,とアナウンスされています.はんだ付けする場合は,自己の責任において,十分注意して行ってください.
安定動作のためには,安定した電源が不可欠ということを再認識させられるとともに,ロケットに搭載された装置の受ける衝撃の大きさが分かる出来事だと思います.
●スイッチが勝手に動作する
「TMR」では,モード選択のスイッチが勝手に動作するという現象が発生しました.これは,プッシュ・スイッチが発射,逆噴射,着地の衝撃で一瞬押されるために起きており,スイッチの構造の選択ミスと,スイッチ入力を行うソフトウェアの双方に問題があったために発生した問題であると言えます.
衝撃によってスイッチが動作する場合は,非常に短い時間だけONが発生しますが〔図8(a)〕,手動の場合は,ある程度の時間ONになります〔図8(b)〕経験を積んだエンジニアであれば,スイッチ入力でこのひげのような動作を排除するために,2度以上のONを検出した場合にONと認識するような処理を行うのですが,経験の少ないエンジニアだと,このような考慮が抜けることも多々あると思います.
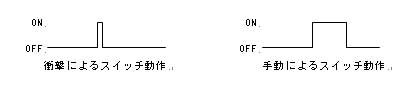
[図8] スイッチ動作の違い
対策としては,物理的に誤作動しないようにスライド・スイッチに変更し,ソフトウェアとしては,スイッチ入力の反応を鈍くするため,数回ONを検出したときにONと判断するように変更しました.


