組み込みシステム制約とそれに対するアプローチ ―― 模型ロケットに観測システムを組み込んだ「Hamana-5」プロジェクトに学ぶ
●チーム「R2D2」のハードウェア構成
チーム「R2D2(未来技術研究所)」は,ペイロード開発部門にエントリーしたため,システム開発部門でBabyBerthaを選択した2チームに比べて,ペイロードのサイズを大きくすることが可能でした.このため,Design Wave Magazine誌の2008年5月号に付属していたCPU基板(CPUは,ARM Cortex-M3コアの「STM32F103」を搭載している)を使用してペイロードを作成しました(写真3).

[写真3] チーム「R2D2」のペイロード
チーム「R2D2」のハードウェア構成を図5に示します.CPUボードに搭載されている加速度センサのほか,ジャイロ・センサを搭載してロケットの軌道を計測し,気圧センサを搭載して上空の気圧を計測するようにしました.取得したデータは,CPUボードに搭載されているSDカードに記録しています.
このシステムで特徴的なのは,レギュレーションにある「外部からペイロードの動作を視認できる装置搭載を義務づける」というところを,無線モジュール(ZigBee)を使用して実現している点です(写真4).ほかのチームが視認装置をLEDの点滅程度ですませているものを,このチームは,ZigBee経由でパソコンと通信して,より正確な状況を取得できるようにしています.
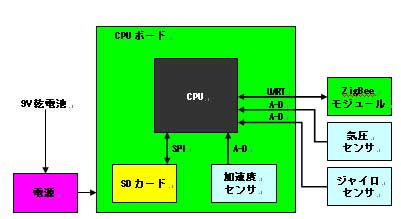
[図5] チーム「R2D2」のハードウェア構成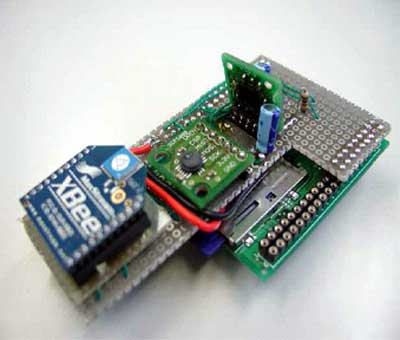
[写真4] チーム「R2D2」のペイロード(CPU基板を外したところ)
●チーム「東海大学 組込み技術研究科」のハードウェア構成
チーム「東海大学 組込み技術研究科(東海大学 専門職大学院 組込み技術研究科)」もペイロード開発部門にエントリーしました.また,Interface誌の2008年9月号に付属していたCPU基板(CPUは,Freescale Semiconductor社のColdFireファミリ「MCF52233」を搭載している)を使用してペイロードを作成しました(写真5).
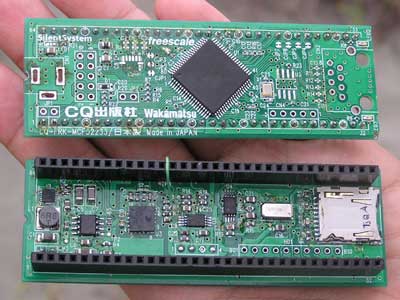
[写真5] チーム「東海大学 組込み技術研究科」のペイロード
雑誌付属のCPU基板(上)とそれ以外の部品を実装した基板(下)を組み合わせている.なお,このチームにはハードウェア開発のスペシャリストがそろっていたため,ハードウェアに関するトラブルは少なかった.
センサとしては,CPU基板に搭載されている加速度センサのほか,ジャイロ・センサ,環境データ観測用に紫外線センサと温度センサを搭載しました.


