組み込みシステム制約とそれに対するアプローチ ―― 模型ロケットに観測システムを組み込んだ「Hamana-5」プロジェクトに学ぶ
各チームのアプローチ
Hamana-5には,「システム開発部門」に2チーム,「ペイロード開発部門」に3チームがエントリーしました(表1).これらのチームがどのようなアプローチを取ったのかについて,ハードウェア構成とペイロードの形状に分けて紹介します.

[表1] Hamana-5参加チーム一覧
●チーム「両刀使い」のハードウェア構成
チーム「両刀使い(ヴィッツ)」のハードウェア構成を図1に示します.このチームは,観測用に圧力センサ,加速度センサ,温度センサ(加速度センサに内蔵)を搭載し,観測したデータをフラッシュROMに格納するシステムとしました.CPUは「H8/3069R」を使用し,CPU内蔵のA-Dコンバータにより,各センサのアナログ情報を取得するようになっています(図2).
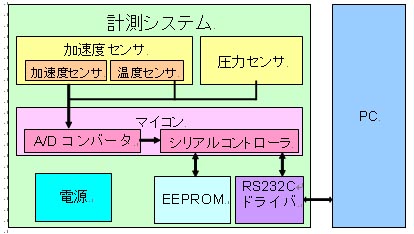
[図1] チーム「両刀使い」のハードウェア構成
[図2] チーム「両刀使い」のペイロード回路図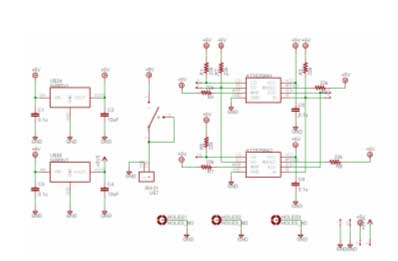
(a)電源・フラッシュROM基板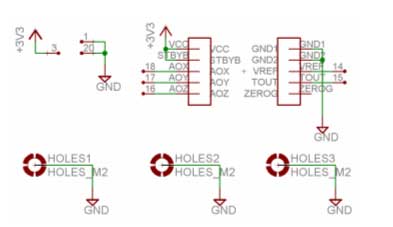
(b)加速度センサ基板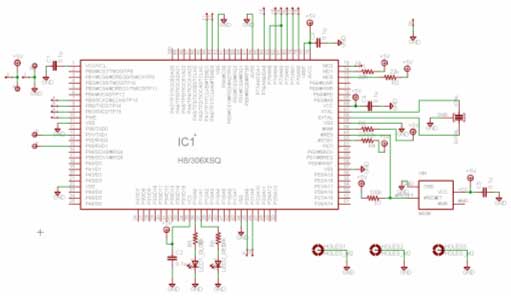
(c)CPU基板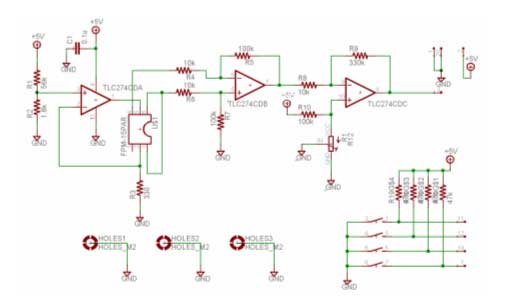
(d)圧力センサ基板


