省エネ,静音家電を実現するモータ制御アルゴリズムの実装事例 ―― dsPICマイコンを利用して3相ACモータを制御
コラム1 磁界方向制御とは
曹 亜君
ここでは磁界方向制御の概要について説明します.
図A-1は,PMモータの動作を示しています.PMモータが回転するには,ロータ磁界とステータ磁界の間に,ある角度が必要です.二つの磁界が互いに90度でない場合,逆起電力(BEMF)と電流にオフセット角度が発生します.この位相オフセットがあると,入力パワーに対するトルク生成が最大になりません.図A-1(a)のトルクとVs角度(θ)のグラフから分かるように,トルクはsinθに比例します.制御回路がこの整流角度を90度に合わせられないと,トルクは最大にはなりません.
図A-1(b)は,磁界方向制御を行った場合のPMモータの動作です.ロータ磁界の角度を検出できれば,ちょうど90度の回転磁界を生成できます.そして,整流角度を90度にすると,トルクを最大にできます.
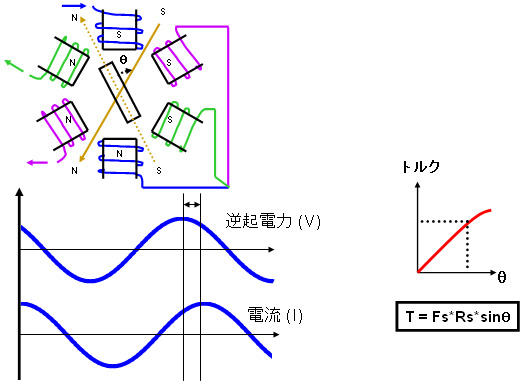
(a) 磁界方向制御を行っていない場合
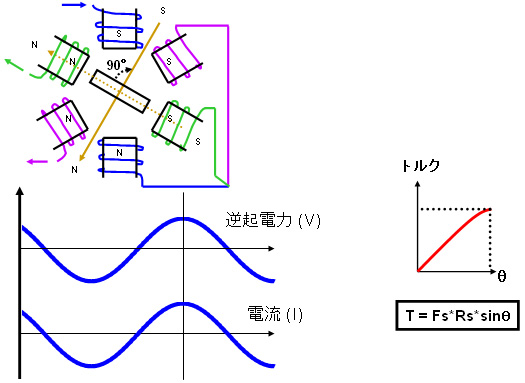
(b) 磁界方向制御を行った場合
図A-1 PMモータの動作
図A-2から,整流角度をロータより常に90度進めるにはどうするかが分かると思います.図A-2の左側の図は,磁界方向制御によってどのようにモータが回転するかを示しています.右上の電圧グラフは,出力電圧が正弦波になることを示しています.右下のグラフでは,ロータが-π(-180度)から+π(+180度)に変化することを表しています.
図A-2 磁界方向制御によるモータの回転と電圧,磁界角度
ステータ磁界を常にロータ磁界より90度前に保つには,時々刻々と変化するロータ位置情報が必要です.ホール・センサをロータ位置検出に使う方法では,60度ごとにしかロータ位置情報が得られません.磁界方向制御には,ロータ位置を検出あるいは推定するためのアルゴリズムが必要です.磁界方向制御によって得られる効果は,モータが生成するトルクの改善とリプルの低減です.
ソウ・ケント
マイクロチップ・テクノロジー・ジャパン(株) シニアFAE


