省エネ,静音家電を実現するモータ制御アルゴリズムの実装事例 ―― dsPICマイコンを利用して3相ACモータを制御
●磁界方向制御アルゴリズムの処理手順
PMモータの磁界方向制御アルゴリズム(ベクトル制御アルゴリズム)の処理手順は,以下のようになります.
・ステップ1
まず,3相ステータ電流iaとibを測定します.ia+ib+ic=0であることから,二つの電流センサについて測定すれば,残り一つの電流は計算から求められます.
・ステップ2
3相電流を2軸系に変換します.この変換により,ia,ib,icの測定値から変数iαとiβが得られます.iαとiβは,ステータから見た,時間とともに変化する直交電流値です.このステップはPark変換と呼ばれます.
・ステップ3
制御ループの繰り返し計算の最後に得られた変換角度を使用して2軸座標系を回転させ,ロータの磁束の向きに合わせます.この変換により,iαとiβから変数idとiqが得られます.ここで,直交電流idとiqを回転座標系に変換します.定常状態では,idとiqは定数になります.このステップはClark変換と呼ばれます.
・ステップ4
idとiq,およびそれぞれのリファレンス値から誤差信号を生成します.idのリファレンスはロータの磁束を制御します.iqのリファレンスはモータのトルク出力を制御します.誤差信号は,PI(比例積分)コントローラに入力されます.それから,PIコントローラがVdとVqを出力し,これが電圧ベクトルとしてモータに送られます.
・ステップ5
Vα,Vβ,iα,iβを入力として,新しい座標変換角度を推定します.この新しい角度に基づいて,磁界方向制御アルゴリズムが次の電圧ベクトルを配置する位置を判断します.
・ステップ6
PIコントローラから出力されるVdとVqの値を,新しい角度を使用して回転し,静止座標系に戻します.この計算によって新しい直交電圧値のVαとVβが得られます.
・ステップ7
VαとVβの値を変換して,3相の値Va,Vb,Vcに戻します.この3相電圧の値から,目的の電圧ベクトルを生成するための,新しいPWMデューティ・サイクル値を計算します.変換,PI制御によるイテレーション(繰り返し計算),逆変換,PWM生成を含む全プロセスを図3に示します.
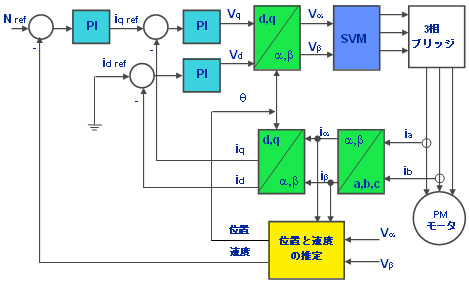
図3 磁界方向制御アルゴリズムの全体構成
3相電圧の値から目的の電圧ベクトルを生成するための新しいPWMデューティ・サイクル値を計算する.


