省エネ,静音家電を実現するモータ制御アルゴリズムの実装事例 ―― dsPICマイコンを利用して3相ACモータを制御
●電流オブザーバ・モデルから逆起電力を求める
システム(モータ)への入力がモータ・モデルへの入力に等しいことが確実であれば,電流オブザーバ・モデルによって逆起電力を間接的に測定できます(図6).その手順は次のとおりです.
まず,モータとモータ・モデルに同じ入力を与えます.ただし,モータ・モデルの方は推定値と測定値が確実に一致するように,閉ループ・コントローラを接続してあります.例えば任意の時刻において,モータの入力電圧と入力電流がモデルと等しければ,モデル式のesについて解くことで,逆起電力を「観測」できます.
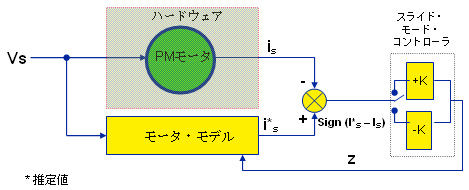
図6 電流オブザーバ・モデルによる逆起電力の間接的な測定
モータとモータ・モデルの両方に,共通の入力を与える.その次の段階では,モータ・モデルの閉ループ・コントローラによって,推定値と測定値が確実に一致する.この状態でesについて解けば,逆起電力が求められる.
オブザーバ・モデルの補正には,スライド・モード・コントローラを使用します.スライド・モード・コントローラは,入力リファレンスに追従して,測定電流isと推定電流is*間の誤差を強制的にゼロにします.誤差の符号に応じて,スライド・モード・コントローラは正または負のフィードバック・ゲインKを割り当て,推定電流と測定電流を一致させます.推定電流と測定電流が一致し,モータとモータ・モデルへの入力電圧が同じであることを確認できれば,逆起電力を計算できます.
モータ・モデルと実際のモータの間で入力電流と電圧が一致していることを確認したら,モータ・モデルから得られる補正係数zによって補正(フィルタリング)して,逆起電力を求めます.このステップでは,次式で示す1次のディジタル・ローパス・フィルタを使用します.
![]()
zで補正してes*を得るには,この式のTをfpwmで置換した次の式を使用します.

ここで,
e(n) : 次の逆起電力の推定値
e(n-1) : 直前の逆起電力の推定値
fpwm : ローパス・フィルタの計算に使用するPWM周波数
fc : ローパス・フィルタのカットオフ周波数
z(n) : フィルタリングされていない逆起電力(スライド・モード・コントローラの出力)
です.カットオフ周波数の値は,スライド・モード・コントローラのゲイン選択に応じて試行錯誤によって決定します.逆起電力とロータの位置の関係は,次式で表されます.
![]()
●ロータの位置を補正するために角速度を求める
θの計算時にローパス・フィルタを使用しているため,計算で求めた角度を使用してモータの巻線を励磁する前に,ある程度位相を補正しておく必要があります.θの補正量はθの変化率,すなわちモータの速度に依存します.θは次の二つのステップに従って補正します.
まず,補正前のθ(計算値)からモータの速度を計算します.次に,この速度を使用して補正量を計算します.速度の計算では,θの値をM個のサンプルについて合計し,この合計に定数を乗じます.
式で表せば,次のようになります.

ここで,
Omega,ω(n) : モータの角速度
Theta,θ(n) : 現在のθの値
PrevTheta,θ(n-1) : 直前のθの値
K : 目的の速度範囲を得るための増幅率
です.


