省エネ,静音家電を実現するモータ制御アルゴリズムの実装事例 ―― dsPICマイコンを利用して3相ACモータを制御
●モータの近似モデルからモータ電流を求める
センサレス制御では位置センサを使用せずにモータの位置を推定します.図4に位置推定機能のブロック図を示します.
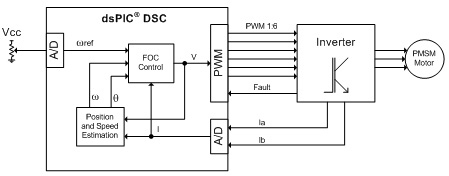
図4 位置推定機能のブロック図
FOC:Field Oriented Control (磁界方向制御)
位置推定はモータの電流と電圧に基づいて実行しますが,モータ・モデルを使用してモータの位置を間接的に測定します.PMモータのモデルがDCモータのモデル(図5)と同じであると仮定できる場合,モータの位置を推定できます.
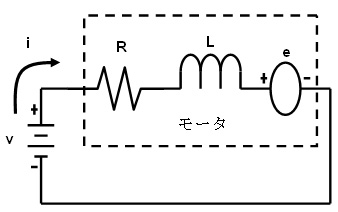
図 5 PMモータのモデル
PMモータは巻線抵抗,巻線インダクタンス,モータ速度に依存する逆起電力から成る電気的なモデルによって近似できる.
図5に示すモータ・モデルから,入力電圧を次式によって計算できます.
これをisについて解けば,次のモータ電流の式が得られます.
ここで,
is : モータ電流ベクトル
vs : 入力電圧
es : 逆起電力ベクトル
R : 巻線抵抗
L : 巻線インダクタンス
です.離散値(ディジタル)で表現すると,上式は次のようになります.

ここでもisについて解くと,次式が得られます.



