省エネ,静音家電を実現するモータ制御アルゴリズムの実装事例 ―― dsPICマイコンを利用して3相ACモータを制御
ここでは,積和演算器を備えたMicrochip Technology社の16ビット・マイコン(dsPIC DSCファミリ)を利用して,3相ACモータのセンサレスの磁界方向制御(FOC)を実現した事例を紹介する.このような技術は,例えば省エネ,静音の洗濯機などに適用できる.筆者が開発したサンプル・コードは,同社のWebページからダウンロードできる.(編集部)
洗濯機やエアコンなどの家電製品の設計では,環境に配慮しつつ高効率を求める新たな規制が課される可能性がつねについて回ります.従来,高効率で静音性に優れたモータ搭載の家電製品を実現するには,一部のモータ・メーカが提供するモータ製品とその制御技術に頼るしかありませんでした.しかし,その状況も変化しつつあります.積和演算器を備えた安価なマイクロコントローラを利用して,高度なモータ制御アルゴリズムを手軽に実装できるようになってきました.
洗濯機の例を考えてみましょう.洗濯機では,攪拌(かくはん)と回転のいずれの動作でも,モータ速度の変化に即座に応答することが要求されます.設計者は,洗濯機に高度なモータ制御アルゴリズムを組み込み,こうしたタスクを果たせるようにする必要があります.現在利用可能な,数あるモータ制御技術の中では,3相ACモータの磁界方向制御(FOC:Field Oriented Control)が注目されています(コラム1「磁界方向制御とは」を参照).この方式を利用すると,例えば省エネ型で静音性に優れた洗濯機を開発できます.
●磁界方向制御を利用してセンサレスでPMモータを動かす
本稿では,積和演算器を備えたマイクロコントローラを利用し,磁界方向制御によってPMモータ(永久磁石同期モータ)を制御する方法を説明します.これはセンサレスの制御で,位置センサや速度センサを使用しません.例えば,コンプレッサの中にはモータがオイルに浸かっているものがあり,ワイヤ・ハーネス(配線)の設置場所に制約がありますが,磁界方向制御を利用するとこうした問題を回避できます.
PMモータには高効率という特徴があります.これは,ロータの磁界が一定しているためで,こうした磁界はロータ上の永久磁石によって発生させます.また,ステータの磁界は正弦波状に分布させた巻線によって発生させます.誘導モータと比べると,PMモータは非常に高いパワー対サイズ比を実現できます.DCモータと比べると,ブラシを使用していない分,電気的なノイズが少なくなります.
●積和演算器を備えたマイコンを利用する利点
積和演算器を備えたマイクロコントローラとして,ここでは米国Microchip Technology社のdsPIC DSCファミリ(dsPIC30F6010A)を利用します(1) .なお,積和演算器を備えたマイクロコントローラを,同社ではDSC(ディジタル・シグナル・コントローラ)と呼んでいます(コラム2「ディジタル・シグナル・コントローラの概要」を参照).このマイクロコントローラは,PWM(パルス幅変調器),A-Dコンバータ,直交エンコーダ・インターフェースなど,モータ制御向けの周辺回路を搭載しており,洗濯機などの家電製品に使われています.
制御ルーチンを実行したりディジタル・フィルタの機能を実現したりするとき,積和演算器を備えたマイクロコントローラを使用すれば,MAC(Multiplier and Accumulator)命令や小数演算を1サイクルで実行できます.また,こうしたマイクロコントローラは飽和処理を実行する回路を備えており,オーバフローを回避できます.
モータ制御においてもっとも重要な機能である電流センサ用として,高速で柔軟なA-Dコンバータが必要となります.dsPIC DSCファミリは,入力サンプルを1Mサンプル/sで変換し,最大4系統の入力を同時に処理できるA-Dコンバータを搭載しています.A-Dコンバータには複数トリガのオプションがあるため,モータの位相巻線電流の測定用に安価な電流センサ抵抗を利用できます.例えば,PWMモジュールによってA-D変換をトリガすれば,スイッチング・トランジスタによりセンサ抵抗に電流を流して,特定のタイミングで入力を検出できます.
●開発したサンプル・コードを公開
磁界方向制御の制御ファームウェアは,dsPICDEM MC1 Motor Control Development Boardを使用して開発しました(2).筆者が開発したサンプル・コードはこちらのWebページからダウンロードできます.
磁界方向制御アルゴリズムのテストとデバッグにはDMCI(Data Monitor and Control Interface)というツールを使用しました.このツールは,同社のマイコン開発環境であるMPLAB IDEに含まれています.
DMCIを利用すると,設計者は開発対象となるシステムからフィードバックされたデータを動的にグラフィックス表示できます.例えばプログラム変数の値をスライダで変化させたり,値を直接入力したり,ブール論理の任意の組み合わせを割り当てることができます.さらに,プログラムで生成されたデータを動的にグラフ表示することも可能です.
今回のシステムのブロック図を図1に示します.
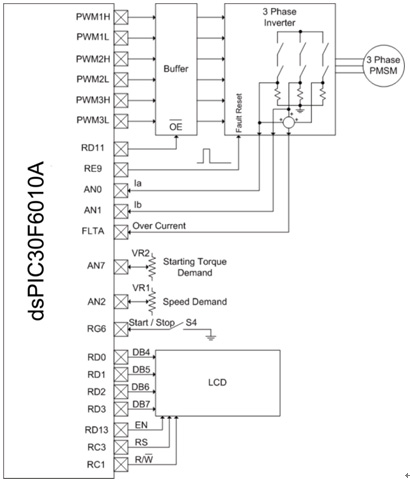
図1 モータ制御システムの構成
PMSM:Permanent Magnet Synchronous Motor (PMモータ)
モータのシャフトには位置センサが取り付けられていません.代わりに,電流測定のためのセンサが複数個取り付けられています.これらのセンサは,インバータ機能ブロックに含まれる低インダクタンス抵抗を使用して,電流を検出します.モータの巻線を駆動するパワー段には,図2のような3相インバータを使用しています.
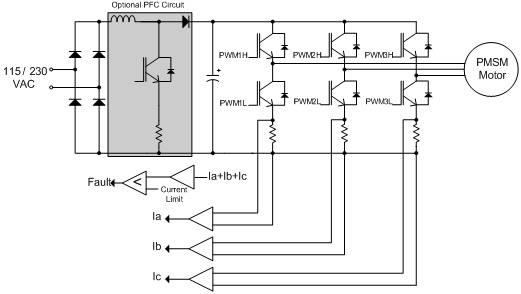
図2 PMモータを駆動する3相インバータ
この図には3相巻線とともに,パワー・インバータ内の電流センサ回路,およびフォールト信号生成回路を示している.これらの回路はシステムを過電流から保護する.


