iPhoneと組み込み技術で未来を考える(7) ―― ライフログ計測のための組み込みシステムとiPhone
●屋内ではセンサ・ネットワークによる局所的情報の計測が必要
屋内でのライフログは,センサ・ネットワーク・デバイスや情報家電の利用履歴などが参照できれば,効率よく計測できます(本コラムの第1回,第2回を参照).
屋内で人の位置を計測する手法には,大きく分けて,大域的情報を利用する方法と局所的情報を利用する方法があります.ここで大域的情報とは,計測された情報から空間内全体にわたって位置を特定できるような情報とします.一方,局所的情報とは,ある特定の場所においてのみ計測できる情報とします.
大域的情報を計測するために,測域センサの一つであるレーザ・レンジ・ファインダ(LRF)が用いられます.ここでは,計測精度を高めるために二つのLRFを用いることにします(図5).LRFを用いれば,人の大まかな位置を計測できるのですが,ライフログとして残そうとしても,環境状態と相対的に関連づけられた言語としての知覚情報である「何をしているのか」という行動の情報に変換することは困難です.
図5 屋内での人の位置の計測とライフログ
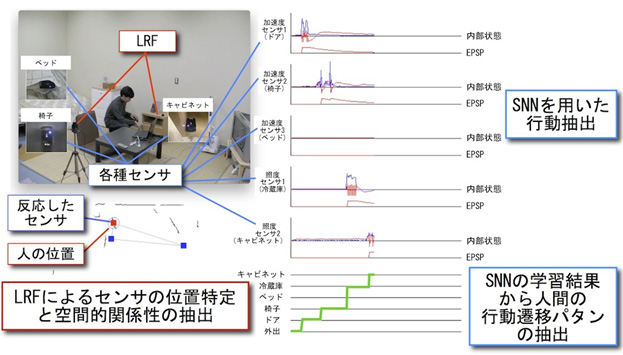
一方,局所的情報を計測するためには,加速度センサや照度センサが内蔵されているセンサ・ネットワーク・デバイスを用います.いすに座っているのかどうか,冷蔵庫やキャビネットを開けているのかどうかなど,ある特定の行動を計測できます.また従来は,センサ・ネットワーク・デバイスの位置を特定するための手段として,信号強度の減衰やアドホック・ネットワークにおけるホップ回数をカウントして相対的な位置関係を特定する方法が提案されてきました.LRFで人の位置を取得できるのであれば,人の移動に合わせて反応するセンサ・ネットワーク・デバイスの位置情報も近似的に特定できます.
センサ・ネットワーク・デバイスは,それが置かれている環境条件が時々刻々と変化する可能性があるため,逐次,基準値を更新しながらこの基準値からの変化を測って,人の行動を特定します.ここでは,スパイキング・ニューラル・ネットワーク(SNN)を用いて人の行動の変化を抽出することにします注6.
注6:スパイキング・ニューラル・ネットワーク(SNN)は,コンピュータ上でシミュレートされた人工神経回路網の一つ.時間的・空間的パターンを学習できる.
計測したい行動のすべてに対し,センサ・ネットワーク・デバイスを事前に配置することは困難です.カメラ画像などの大域的情報を併用することにより,個人のライフログを収集しながら,必要に応じてロボット・パートナとの対話により,計測が難しいライフログを収集します.
●プライバシ問題への配慮が求められる
ライフログはプライバシの塊です.公共施設や銀行などにおいて,明らかに「見られている」と感じる防犯カメラに対して面と向かう人は少ないでしょう.ましてや,日常の生活の中にカメラが存在することには抵抗があります.高齢者の見守りや共働き夫婦の子供の見守りにおいても,カメラやセンサの利用をできるだけ避けたいと考えている人は多いはずです.
このように,家庭内のモニタリングは,見ている側には安心感が生まれますが,見られている側には,プライバシの侵害感などが強く生じてしまいます.このような状況下で,ライフログを安心して計測することは難しいように思われます.しかし,死後数週間も発見されなかった独居高齢者などのニュースを見ると,このような悲しい事件を繰り返さないための何らかの見守りシステムが必要であることは確かだと思います.
それでは,プライバシの侵害感は,どこから来るのでしょう.おそらく多くの人は,防犯などを対象として取り付けられたカメラを通して見ている誰か,すなわちカメラの向こう側に未知の人を強く意識してしまうのだと考えられます.
これに対してロボット・パートナに取り付けられたカメラの場合,ロボットそのものの直接的な主体性により,防犯カメラのようにカメラの向こう側の誰かに見られているという感覚が大幅に軽減されます.さらに,ロボットが人間に話しかけたりすれば,人間同士のコミュニケーションのように面と向かって対話することで,真正面から見た高齢者の顔の表情を取り込んだりできるという利点もあります.防犯カメラでは決して得ることが難しい正面からの顔の表情を,ロボット・パートナなら,日頃のコミュニケーションを通して難なく取得できるのです(図6(a)).
図6 ロボット・パートナとプライバシー
(a) ロボット・パートナを介したモニタリング

(b) モニタリングの中止

最近では,自分の顔写真を撮るのに抵抗を感じなくなってきましたが,カメラに向かって自然な表情をつくることは,まだまだ難しいかと思います.ロボット・パートナが発する冗談一つで,カメラを意識することなく素敵な表情を撮れるかもしれません.
もちろん,誰にも知られたくない秘密もあります.そのようなときには,ロボット・パートナの顔に帽子をかぶせたりするだけで,カメラ画像などによるライフログの収集を一時中断できるような配慮が必要です(図6(b)).
プライバシの侵害感は,個人情報やライフログを収集する上で極めて重要な議論です.今後も議論を重ねていく必要があります.
* * *
今回,ライフログをテーマに,組み込みシステムとiPhoneの関係を考えてみました.iPhoneは直接的,かつ,積極的にライフログを残せるツールであり,センサ・ネットワーク・デバイスやロボット・パートナは,iPhoneの機能を補いながら,間接的にライフログを残すためのツールになりえます.どちらかが欠けても,中身の濃いライフログは収集できませんし,ライフログの記録が長続きしなくなりそうです.
このように,iPhoneが生活の一部に溶け込むことにより,iPhoneに連携するさまざまな組み込み技術や組み込みシステムが知らず知らずのうちに浸透してきそうです.未来の姿と思われていた状況が,すでに当たり前のように日常の中に入っていくのかもしれません.
くぼた・なおゆき
首都大学東京大学院 システムデザイン研究科 准教授
◆筆者プロフィール◆
久保田 直行.1997年,名古屋大学大学院工学研究科 マイクロシステム工学専攻 博士後期課程修了.博士(工学).1997年,大阪工業大学工学部 機械工学科助手,1999年,同講師.2000年,福井大学工学部 知能システム工学科助教授.2004年,東京都立大学大学院工学研究科機械工学専攻 助教授となり,2005年,首都大学東京システムデザイン学部 ヒューマンメカトロニクスシステムコース 准教授,現在に至る.その間,2002年から科学技術振興機構戦略的創造研究推進事業研究員,2006年~2008年に同事業発展研究研究員兼任.2007年からポーツマス大学客員教授.2009年から韓国ソウル大学客員教授.


