ロボット関連の技術の種が続々登場 ―― イノベーション・ジャパン2007
2007年9月12日~14日,東京国際フォーラム(東京都千代田区)にて,大学の研究を産業界に紹介するイベント「イノベーション・ジャパン2007」が開催された(写真1).第4回目となる本イベントでは,「ナノテク・材料」や「バイオ・アグリ」,「医療・健康」,「IT」,「環境」,「新エネルギー・省エネルギー」,「ものづくりの先端技術」といった7分野に分けて展示が行われ,多指ロボットや家庭向けロボットなどに応用できる技術などが展示されていた.大学や研究機関のブースのほか,TLO(技術移転機関)や大学発ベンチャ,大学発ベンチャを支援する証券会社やベンチャ・キャピタルなどのブースが設けられた.

[写真1] 会場の様子
●手指の動きをハンド・ロボットが模倣
筑波大学大学院 システム情報工学研究科 知能機能システム専攻 准教授の星野 聖氏は,人間の手指の動きを模倣するハンド・ロボットを展示した(写真2).手の動きをカメラで撮影し,取得した輪郭から手指の形状を推定して動作する.150~160フレーム/sの速度で手指の形状を推定できる.


[写真2] 手の動きを模倣するハンド・ロボット
●ロボットの指先に用いる光学式の触角センサ
奈良先端科学技術大学院大学 情報科学研究科 情報システム学専攻 教授の小笠原 司氏は,多指ロボットの指先に実装することを想定した,光学式の触覚センサを展示した(写真3).ゲル状の物質を固めたものにビニール製の細いパイプを通してあり,これにLEDの光を当てる.この光の変化をカメラで読み取り,表面にかかった圧力を測定する.
[写真3] 光学式の触覚センサのデモンストレーションの様子
●足で踏んで指示を出すユーザ・インターフェース
静岡大学工学部 機械工学科 准教授の松丸 隆文氏は,床面にアイコンを映し出し,それを踏むことによって操作できるロボットのデモンストレーションを行った(写真4).同科ではこの機能を「ステップ・オン・インターフェース」と呼んでいる.情報提示と命令指示の両方を行えること,分かりやすいアイコン表示が可能なこと,ユーザが日常使用している足や杖などで入力できることから,作業現場や家庭における支援ロボットのユーザ・インターフェースとして有力だと見ている.
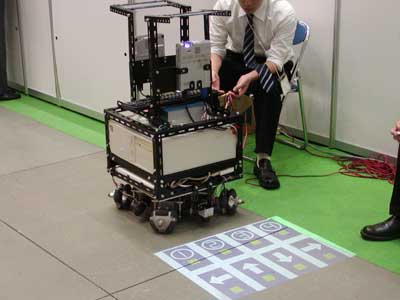
[写真4] ステップ・オン・インターフェースのデモンストレーション
●無線信号を「つまんで」取得
公立はこだて未来大学 システム情報科学部 情報アーキテクチャ学科 助教の光藤 雄一氏は,ユーザが信号をつまんで取得できる光信号システムを展示した(写真5).光信号はLEDのON/OFF(点灯/消灯)の切り替えによって実現する.送信機には二つのLEDが取り付けられており,互いに逆パターンのON/OFF光信号を出力する.このため,通常時は二つのLEDの光信号がキャンセルされて,受講側で復調できない.ユーザが取得したい信号を選択するとき,一方のLED光を遮ることにより,受信機側で復調が可能となる.この仕組みにより,送信機が複数ある場合でも混信しない.
携帯電話へのデータ通信などへの応用を考えているという.例えば,QRコード(2次元バーコード)の情報量は6Kバイトであるのに対し,光通信なら5Mbpsでデータを転送できる.音楽データのダウンロードなどに有用だと見ている.

[写真5] 二つのLEDで出力した光信号を受信したところ
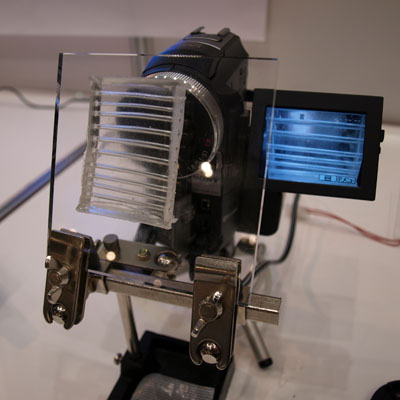
●手ぶれ補正機能を評価するシステム
電気通信大学 電気通信学部 情報通信工学科 准教授の西 一樹氏は,市販のカメラが備えている手ぶれ補正機能を評価するソフトウェアのデモンストレーションを行った(写真6).点を縦横並列に並べた映像を高速で切り替えながら市販のカメラで撮影する.開発したソフトウェアで撮影したデータを比較し,点の位置が合っていればぶれが少ないと判定する.映像のパターンは複数用意する.上下左右の移動量や360℃の回転量を測定し,どの部分に対して手ぶれ補正がなされていないかを確認できる.
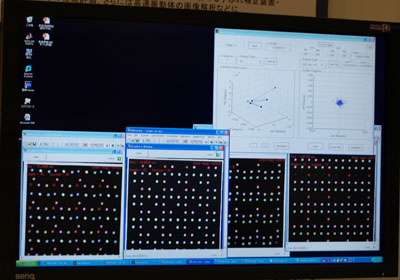
[写真6] 手ぶれ補正を評価するソフトウェアの画面
●5分間の心拍測定で健康状態を判定
首都大学東京 理工学系 生命科学コース 助教の矢澤 徹氏は,心拍ゆらぎから健康状態を自動判定する計算方法を紹介した(写真7).心拍数を約5分間(250拍)計測することにより,心臓循環系の問題やストレス状態を推定できる.
心拍のゆらぎから「トレンド除去変動解析(DFA:Detrended Fluctuation Analysis)」手法によって循環器の状態を識別する研究は,10年ほど前から行われているという.当初は24時間の計測が必要とされていたが,その後,1時間程度に短縮した.同氏によると,理論上は5分間の計測で判定が可能であるという.同氏の実験によると,現在は20分間の計測で判定できることが確認できている.
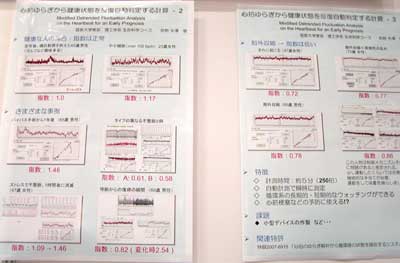
[写真7] 心拍ゆらぎ計測実験の結果
●20cm長のプラズマを発生させる大気圧プラズマ・ジェット
豊田工業大学工学部 先端工学基礎学科 教授の原 民夫氏は,最大20cm長の大気圧プラズマを発生させる大気圧プラズマ・ジェットのデモンストレーションを行った(写真8).自動車のボディなどの表面処理にプラズマを照射する際に,従来はプラズマを放出しても酸化現象を起こして,2cm程度しか伸びなかった.窒素の充満した装置内で照射することにより,これを20cmに伸ばすことができたという.
[写真8] プラズマを噴射している様子
●1kgの計測システムを搭載できる飛行船
静岡大学工学部 機械工学科 助教の大津 広敬氏は,1kgの計測システムを搭載できる全長4.5mの飛行船を展示した(写真9).同氏らが開発した飛行船本体にラジコン部品を取り付けて,操縦できるようにしている.飛行船の浮力は3.0kg.本体の重さが1kg,ラジコン部品の重さが1kgで,残りの1kg分の計測機器を搭載できる.
飛行速度は1.5m/s.飛行可能時間(モータ作動時間)は約60分.大気データ計測や上空からの撮影,無線LANの中継基地としての利用などを想定している.

[写真9] 飛行船を操縦しているところ
●先染め織物で写真を表現
広島大学大学院 工学研究科 教授の中野 浩嗣氏は,デジタル・カメラなどで撮影したフルカラー画像を基に,あらかじめ染められた糸(先染め糸)を組み合わせて絵柄を織り上げる「先染め織物」向けのジャガード織機用データを生成するソフトウェアのデモンストレーションを行った(写真10).8色(白,黒,赤,緑,青,シアン,マゼンタ,黄)の糸を組み合わせてフルカラーの画像を再現する.ジャガード織機は従来のものをそのまま利用できる.
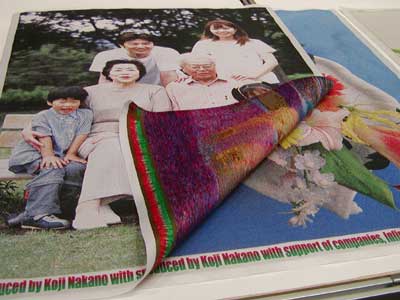
[写真10] 開発したソフトウェアを利用して作った先染め織物
●自己組織的なセンサ・ネットワーク
大阪大学大学院 情報科学研究科 教授の村田 正幸氏は,センサやアンテナを備えたモジュール端末を使ったネットワークのデモンストレーションを行った(写真11).端末は自己組織的にネットワークを構成する.設置した場所の状態などを測定してデータとして送信し,端末からほかの端末へバケツ・リレーのように転送する(これを蛍方式と呼んでいるそうだ).端末は数百個~数千個設置できるという.
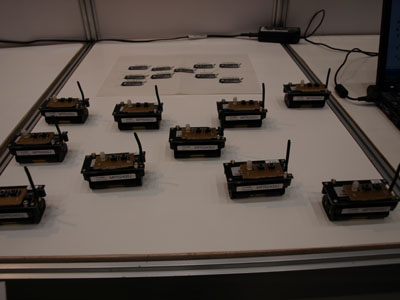
[写真11] ネットワーク端末を用いたデモンストレーションの様子
●Microsoftが大学の展示を表彰
本イベントでは,毎年の開催に合わせて,ビジネスとしての可能性や発展性,将来性を考慮して,大学の出展者に対して賞を贈っている.今年はMicrosoft社が企業支援活動の一つとして行っている「Innovation Award」の表彰式が行われた(写真12).
Innovation Awardは,大学ゾーンの研究成果から選ばれる「大学出展者部門」,マイクロソフト産学連携研究機構とマイクロソフトイノベーションセンターが研究開発を支援する大学の研究室から選ばれる「アカデミック部門」,マイクロソフトが支援している大学発ベンチャやITベンチャから選ばれる「コマーシャル部門」の3部門に分かれている.各部門ごとに優秀賞や最優秀賞などが贈られた.
「大学出展者部門」では,東京工業大学大学院 総合理工学研究科 化学環境専攻 准教授である渡辺 隆行氏の研究「大気圧プラズマによる廃棄物処理システム」が最優秀賞を受賞した.「コマーシャル部門」ではLunascape 代表取締役である近藤 秀和氏とタクラム・デザイン・エンジニアリング 代表取締役である田川 欣哉氏の共同研究「レーザードローイング ツール『Afterglow』」が,「アカデミック部門」では東京大学 情報基盤センター 片桐 孝洋氏の「Windows CCS上の数値計算ライブラリのためのMS-MPIの実装方式の自動チューニング」が最優秀賞を受賞した.また,立命館大学 理工学部 機械システム系 機械工学科 教授である谷 泰弘氏の研究「マイクロ加工を支援する機械加工工具の機上再生技術」がマイクロソフト特別賞を受賞した.

[写真12] Innovation Awardの受賞者たち


