iPhoneと組み込み技術で未来を考える(3) ―― 組み込みシステムとフェイル・セーフ
●固定型センサと移動型センサ
先ほど,センサ・ネットワークを用いた不審者検出の例を述べました.防犯カメラが設置されたことによる犯罪の未然防止へとつながる抑止効果などが報告されていますが,警官や警備員の職務尋問も非常に重要です.もちろん,警官や警備員の命は尊いものです.そこで,出番となるのが警備ロボットです.
怪しい挙動をしている不審者に,警備ロボットが近寄り,「何をしているの?」と質問してみます.無線センサ・ノードは,受動的な計測が中心ですが,ロボットの利点は,直接,人と能動的なコミュニケーションができることです.あいまいさがあるのであれば,直接,聞いてみるのが一番です.
さて,ここで考えることは,無線センサ・ノードは,ある特定の場所や状態を計測するために用いられるセンサであり,低コスト化のため,精度や信頼性は高くないものが多いかもしれません.
一方,移動可能なロボットは,対象とする人の近くまで行き,その人の状態をロボットに取り付けられているセンサで詳細に計測することができます.
従って,ここで,無線センサ・ノードは「固定型センサ」,ロボットは,「移動型センサ」と位置付けることができます.固定型センサは,必ず計測したい場所を随時計測し,移動型センサは,必要と思われる場所に適宜,移動しながら,さらには,人と対話しながら,状況を特定するように用いることができます.
このように,センサ・ネットワークとロボットが,対象とする状況に合わせて協調するモニタリング・システムは,非常に重要になります.
●Case Study 1:緊急事態をすみやかに伝える
警官や警備員が,このようなモニタリング・システムを用いて,不審者や困っている人を見付け状況を特定するためには,現場に直行しながら,情報を取得する必要があります.やはり,ここでもiPhoneのような小型携帯端末は必要不可欠です.
ロボットの遠隔操作は,iPhoneに映し出される不審者や困っている人の顔を見たり声を聞きながら,事前に設定された対話のボタンを押し,状況の特定を進めることができます.例えば,パートナ・ロボットを用いた高齢者宅での見守りの例を考えてみましょう.
ここでは,三菱電機特機システムが開発した全方位移動ロボット(1)上のパン・チルト・カメラをiPhoneの加速度センサの情報を用いて制御します.ロボット自体のナビゲーションは,タッチ・インターフェースで行っています(図4).

図4 iPhoneを用いたロボットの遠隔操作
図5に高齢者がベッドから落ちたときの状況を特定するために遠隔操作をしている様子を,また,図6にiPhone上に映し出された映像を示します.状況をできるだけ早く伝えるために,解像度が低く,フレーム・レートが高い画像を送っています.

図5 ロボットによる見守りの様子
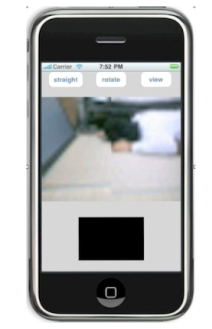
図6 iPhone上での映像
逆に,細部まで詳細に見たい場合には,フレーム・レートを犠牲にして,解像度の高い画像を送ることもできます.このように,遠隔操作におけるフェイル・セーフは,限られたネットワークの状態が制約となり,モニタリングの意図にあわせて,フレキシブルな情報の収集・転送・可視化の上に,使いやすい操作性の実現が要求されます.
言い換えるならば,高度なフェイル・セーフの実現のためには,iPhoneの性能を十分に引き出し得る組み込み技術の開発がキーとなります.


