iPhoneと組み込み技術で未来を考える(3) ―― 組み込みシステムとフェイル・セーフ
さて,二つ目のフェイル・セーフは,システムは正常に稼働しているにもかかわらず,センサそのものの個体差に基づく精度の違いや計測データの異常に基づく状況認識の失敗です(図3).
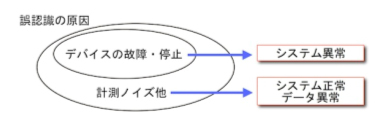
図3 センサ計測における誤認識の原因
例えば,設置場所が悪く,しばしばノイズが入るような場合は,誤認識してしまいます.不審者ではないのに,不審者と認識したり,逆に不審者の侵入を見落としてしまう危険性があります.これは非常にやっかいな問題であり,組み込みシステムの導入の現場で経験的に解決しなければならない場合がほとんどです.しかしながら,単に受動的に計測している無線センサ・ノードでは,たった今,計測したデータが正しいかどうかは,その無線センサ・ノード自体では判断できません.ちょうど,人間が自分の見たことや聞いたことの正しさを,自分自身では証明できないのと同じです.
自分の五感が感じたことは,感じたこと自体にはあいまいさはなくても,感じた内容の解釈にあいまいさが残ります.このあいまいさを解消するためには,必ず,その場に居合わせた他人の感じた内容が必要になり,そのためのコミュニケーションが必要になります.無線センサ・ノードも同様で,計測データにあいまいさがあるのであれば,隣接する無線センサ・ノードのデータを参照することにより,あいまいさを解消することができます.


