ZigBeeモジュールを使用したモデル・ロケット軌道計測システムの製作
●○● Column ●○●
モデル・ロケットの安定性
宇宙空間まで飛行する大型ロケットには,飛行中の姿勢を制御するための装置が搭載されています.一方,モデル・ロケットは飛行中の姿勢制御ができないので,ロケットの構造として飛行安定性を得る必要があります.それでは,ロケットはどのようにすれば安定して飛行するのでしょうか.重要な要素として,重心と圧力中心があります.この二つの点の位置関係で,ロケットの安定性が決まります.
●重心
ロケットの質量の中心のことです.質量,運動エネルギーが集中している点になります.
重心位置は,ロケットを三角柱の上に置いて割り出すことが可能です(図A.前後のバランスが取れた位置が重心になる).ロケットはこの点を中心として,回転などの運動をします.
図A 重心
●圧力中心
ロケットは空気中を飛行するため,飛行中の機体の周りには空気の流れによる圧力が発生します.この圧力の中心が圧力中心です.
圧力中心は迎え角(ロケットの向きと空気の流れの角度)によって前後に移動します.迎え角が90°のとき最も前寄りになり,迎え角が少なくなるにつれて,後方に移動します.圧力中心はロケットの形状から計算で求めることが可能ですが,計算するのは大変なので厚紙をロケットのシルエットの形に切り,その重心位置を測ることで求めることができます(図B.この位置が迎え角90°のときの圧力中心).
図B 圧力中心
ロケットが安定して飛行するためには,重心が圧力中心よりも前にある必要があります.ロケットは重心位置を中心として運動するため,圧力中心が重心より後ろにあることで,機体の向きが進行方向からずれた(迎え角が発生した)場合,圧力は圧力中心に働きますが,重心が圧力中心より前にある場合,迎え角を少なくする方向に働きます(図C).しかし,重心が圧力中心より後ろにある場合,迎え角を増やす方向に圧力が発生してしまい,進行方向から外れていくことになります.
図C 重心と圧力中心の位置関係
重心が圧力中心より前にある必要があると説明しましたが,極端に前にあると,風の影響で風上に向く力が強くなりすぎてしまい,危険です(風上に向かって水平飛行してしまう).このため,重心と圧力中心の距離は機体の直径の1~2倍の間に設定すると良いようです.
ちなみに,筆者ら(チームT・D)の機体の重心は機体のほぼ中央にあり,圧力中心は重心位置から機体の直径分ほど後ろに位置しています(写真A).
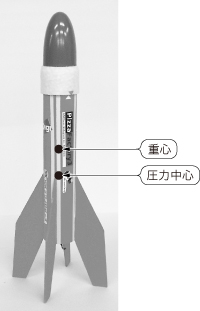
写真A チームT・Dの機体における重心と圧力中心
また,機体を実際に飛行させる前に,機体の安定性を確認するため「スイング・テスト」を行いました.これは,機体の重心位置に糸を付けて振り回すもので,ロケットが実際に安定して風上を向くかどうかを確認し,安定して飛行することを確認します.これは,モデル・ロケットを安全に飛行させるために必要なテストです.モデル・ロケットを打ち上げる際には,必ず実施することをお勧めします.


