報告が滞ってしまって申し訳ありません
HAMANA8の最終打ち上げを昨年の11月12日に実施しました。
HAMANA8は天候に恵まれず試射は1回しか開催できず、また、最終打ち上げも延期という中で何とか開催できました。
最終打ち上げに参加したチームのうち、「GreenApple」「MWM」「ブラック」の3チームの報告を順次紹介していきます。
(赤文字は編集者コメント)
GreenApple
ロケット概要

| 名称 | Baby Bertha |
| 型番 | EST 1261 |
| 全長 | 41cm |
| 重量 | 33g |
| 総重量 | 118g |
ペイロード構成
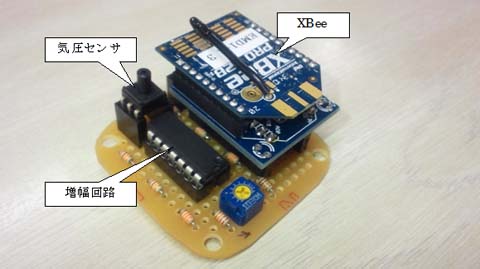
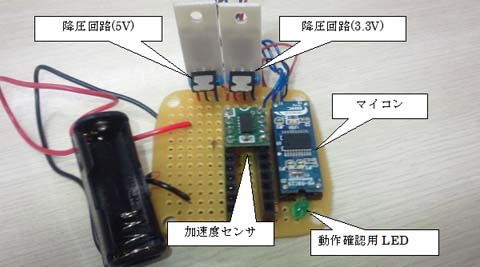
| マイコン | MB-R8C29 |
| 加速度センサ | MMA7361L |
| 気圧センサ | MPS-2407-015AD |
| 通信モジュール | XBee PRO |
| オペアンプ | LM324N |
| その他 | 動作確認用LED、降圧回路(3.3V、5V) |
| 本体重量 | 54g(電池含む) |
| 格納部重量 | 33g |
開発期間
2011.2.8~2011.11.11
打ち上げ結果:1回目
図1.XYZの位置関係(三次元グラフ)(一回目)
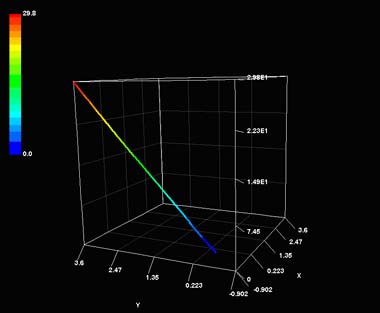
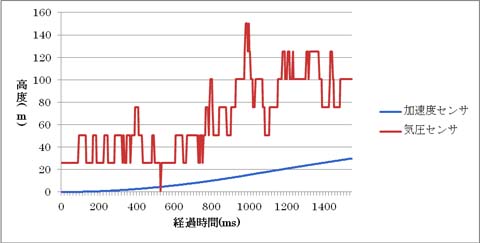
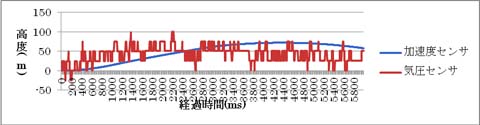
図2.加速度センサ(Z軸方向)、気圧センサ各々で算出した高度(一回目)
打ち上げは成功したが、データの送信が途中で止まってしまった。
図1をみると、ほぼ直線となっている為、ロケットの落下が始まる前に
データの送信が止まってしまったと思われる。
図2をみると、気圧センサのデータから算出した高度が波打っている。
ハードウェアマニュアルによるとAD変換時に誤差が±3あり、電圧に直すと約±14.7mVの誤差が出る。
さらに気圧に直すと約±8.58hPaとなり、高度に直すと約±74.9mとなる為、誤差の影響が大きく
波打つデータとなった。
A-D変換時の±3というのは、CPUのデータシートにある、誤差±2LSBのことでしょうか?
この誤差のことを言っているのなら、原因は違うところにあると思います。
A-D変換誤差というよりは、空気中を高速移動しているために発生する乱流か、A-Dコンバータの
入力端子に入ってくる信号にノイズが乗っている可能性のほうが高いと思うのですが...
停止中のデータが安定しているようなら、乱流の影響と考えられます。
【原因】
落下後のペイロードを確認したところ、乾電池が外れていた。
その為、マイコンにリセットがかかり、データの送信が止まっていた。
【対策】
乾電池が外れないように、テープで固定し、ニ回目の打ち上げを実施。
電池の固定にテープというあたりが、HAMANAらしくていいですねぇ
対策を実施して、2回目の打ち上げ結果です。
図3.XYZの位置関係(三次元グラフ)(ニ回目)
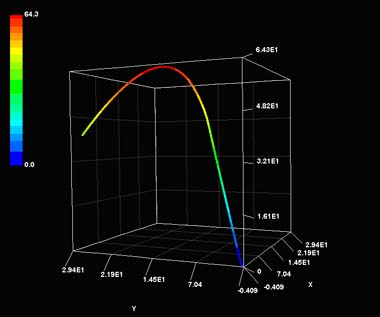
図4.加速度センサ(Z軸方向)、気圧センサ各々で算出した高度(ニ回目)
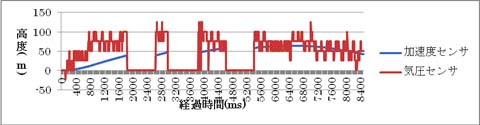
打ち上げは成功したが、データが途中で抜け落ちてしまっていた。
図4をみると、約三分の一ほど抜け落ちていた。
図3は、放物線を描いているが、グラフの元となっている位置データは、
前回取得したサンプリングデータを元にして算出した、速度と位置を基準にしている為、
放物線のデータが出てしまった。
気圧センサについては、打ち上げ一回目と同様。
【原因】
落下後のペイロードを確認したところ、特に問題なかった為、受信が上手く出来ていないと推測。
【対策】
受信する場所を変え、XBee Proのアンテナを立て、受信状態を改善し、三回目の打ち上げを実施。
いやいや、電波は見えないので受信できるかどうかの確認は難しいですねぇ..
ZigBeeは2.4GHzなので、直進性が高く、ちょっとした遮蔽物で届かなくなってしまいます。
そして、3回目の打ち上げ結果が以下です。
図5.XYZの位置関係(三次元グラフ)(三回目)
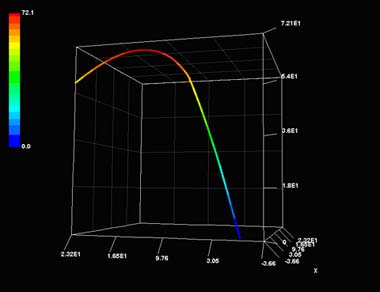
図6.加速度センサ(Z軸方向)、気圧センサ各々で算出した高度(三回目)
見事、データ取得成功です。
報告内容には失敗事例が記載されていなかったのですが、そのあたりは別途インタビューして
後日、失敗事例集のような形で報告したいと思います。
次回はチーム「MWM」の報告を紹介します。
コメントする