iPhoneと組み込み技術で未来を考える(6) ―― iPhone,iPadを活用した家庭用ロボット・パートナ
●装着するロボット,回答するロボット
人間の身体的能力と知的能力の拡張として,ロボットの存在を考えてみます.まずは身体的能力の拡張として,遠隔操作ロボットや手術用のロボットなどが挙げられます.また,ロボット義手やロボット義足などは,失った物理的な身体機能を代替することを目的として開発が進められています.そして,マッスル・スーツやアクティブ歩行器は,空気圧式人工筋肉を用いることにより,体に装着して物理的な身体能力を増幅することが可能です(図3)(5).
図3 人間の物理的身体能力の拡張
(a) マッスル・スーツ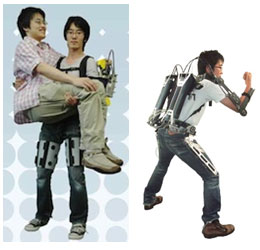
(b) アクティブ歩行器
一方,空間知能化やインテリジェント・ルームなどは,部屋の中の壁などにセンサやアクチュエータを埋め込み,部屋そのものをロボット化してしまうことにより,人間の身体的な能力を拡張しようとするものです(図4)(6).ただし,ロボットを家庭内に導入して人間への物理的な支援を行うためには,安全性や耐故障性の問題,コストの観点など,さまざまな課題が残っています.
図4 インテリジェント・ルームの例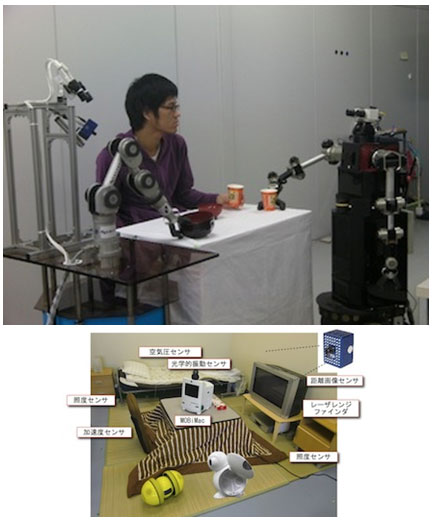
次に,知的能力の拡張の観点から考えてみましょう.知識の外在化が進む人間の知的能力を拡張するロボットの代表例は,直接的には,情報サービスを行うコンシェルジュ型のロボット・パートナでしょう(本連載コラムの第2回を参照).自然なコミュニケーションを実現するため,高性能化を目指してこのロボットに多くのセンサを組み込むと,高価になってしまいます.各家庭にロボット・パートナを普及させるためには,高性能化よりも,低価格化や耐故障性を考える必要があると思われます.
●iPhoneやiPadを使った家庭用ロボットを作る
ここで,低価格化と耐故障性を考慮した普及型家庭用ロボット・パートナの形を考えてみます.ロボットが外界を知覚するためには,多くのセンサを必要とします.少なくとも,人とコミュニケーションを行うためには,カメラやマイクは必要でしょう.一方で,iPhoneをはじめ,さまざまな種類のスマートフォンが利用できるようになった現在,iPhoneとロボットを融合することにより,ロボット・パートナの低価格化を実現できると考えられます.
最新のiPhoneには二つのカメラと二つのマイクが内蔵されており,さらには加速度センサ,ジャイロスコープ,光センサ,コンパスなど,ロボットに搭載するべきセンサが既に取り付けられています.すなわち,iPhoneをロボットに取り付けることにより,ロボットから多くのセンサを取り除くことができます.また,iPhoneに内蔵されているCPUは,簡単な音声認識や画像処理を行い,人との最低限のコミュニケーションを行うための十分なスペックを持っています.従って,iPhoneにロボットのセンシング部と意思決定部を担わせることにより,ロボット本体は,ハードウェア的にはアクチュエータ部のみで十分となります.あとは,iPhoneと通信するためのデバイスと,モータ出力へと変換するための最低限のマイコンがあれば問題ないでしょう.iPhoneよりも低価格なiPod touchでさえ,二つのカメラとマイクを内蔵しており,ロボットのセンシングに必要な最低限の計測を行うことができます.
iPhoneを実装したロボットの一例を図5に示します.ベストテクノロジーなどで売られているRobotis社の 「BIOLOID」を用いて組み上げたロボット・パートナ「iPhonoid」注2です.タッチスクリーンを前にして,必要な情報を表示します.
注2:iPhonoidという名称は,最近,Androidを用いたiPhoneライクなスマートフォンに用いられていますが,筆者らの研究室では,以前からこの名称を用いていたので,そのまま記載している.また,iPod touchを取り付けた場合の名称は「iPodloid」に,iPadを取り付けた場合の名称は「iPadloid」になりそうだ.
図5 Bioloidを用いたiPhonoid
(a) iPhonoid本体
(b) iPhoneバージョン
(c) iPadバージョン
さらに,最小限のロボット機能のみを実装した「iPhonoid mini」注3を図6に示します.BIOLOIDはバッテリ部が大きいためボディが大きかったのですが,iPhonoid miniではバッテリが小型化されています.さらに,チャージング・ステーションとドッキングすることにより,iPhone用充電台を介してiPhoneを充電できます.
注3:三菱電機特機システムにプロトタイプを試作していただいた.
図6 iPhonoid mini
(a) iPhonoid mini本体
(b) iPhoneバージョン
(c) iPadバージョン


