走行消費電力の低さを競うロボコンを開催 ―― Green ET Challenge 2010コンテスト
2010年9月18日,ロボスクエア(福岡市博多区)において,走行体の消費電力の低さを競うコンテスト「Green ET Challenge 2010」が開催された(写真1).主催は福岡市.同市が行っている「先進的組込み技術者育成事業」の一環として,本コンテストを行った.事業実施はNPO法人 九州組込みソフトウェアコンソーシアム(QUEST)が担当した.

写真1 Green ET Challenge2010
福岡市は2009年度から3年計画で,先進的組込み技術者育成事業として技術セミナなどを開催している.その一つに,プロジェクト型実践演習(PBL:Project Based Learning)がある.2009年度のPBLでは「ETロボコンを利用した消費電力測定」,「水素燃料電池を利用したライントレーサの製作」を実施した.2010年度のPBLでは,「組込みソフトウェアと低炭素社会」をテーマに,より低い消費電力で走行できるロボット・カーを製作し,実際に走行させるコンテストを行った.
本コンテストに参加したのは,企業5チーム,学校2チームの合計7チームである.各チームは座学で得た知識と基本モデルをもとに,アルゴリズムを検討しながら本コンテストに挑んだ.
●市販の模型自動車に制御基板と計測器を搭載
ロボット・カーの基本モデルは,運営側で用意した(写真2).走行コースとして,タミヤのモータ付き模型自動車「ミニ四駆」の専用コースを用いた.走行体の基本モデルのボディもミニ四駆を採用し,AVRマイコンによる制御基板を搭載した.
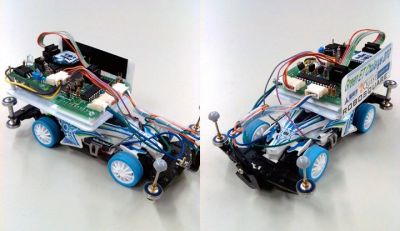
写真2 基本モデルをもとに製作した回生ブレーキ付き走行体
基本モデルは筆者が作成した.ブレーキ時にモータを閉ループにして,惰性で回るモータから電流を発生させる回生ブレーキ機能を付けた.基本構想から2回の試作を経て,のべ3カ月をかけて完成させた.基板が丸出しで格好良いとは言えないが,走りだしたときには感無量であった.
●課題1:コースの難所をクリアせよ!
本コンテストにはいくつかの課題が仕込まれている.課題の一つは,走行コースに設けられた3カ所の難所である(図1).そのうちの2カ所はアップダウンのコースとなっており,その先は必ず急カーブが待ち受けている(写真3,写真4).走行体がソフトウェアで制御されていないと,坂道を上った後にジャンプしてしまい,着地点が急カーブのためほとんどがコースアウトするというわけだ.
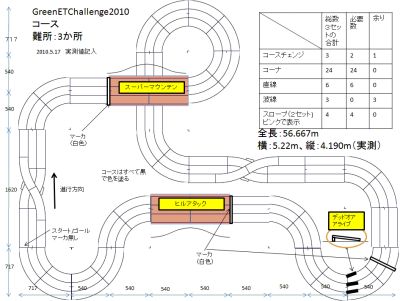
図1 Green ET Challenge 2010の走行コース
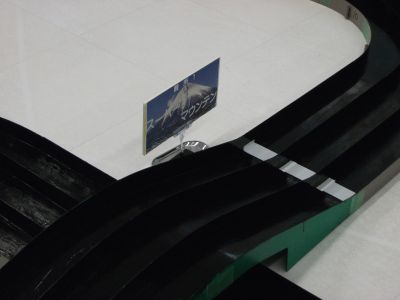
写真3 難所その1「スーパーマウンテン」

写真4 難所その2「デッドオアアライブ」
もう1カ所の難所には,カーブの内側に走行体が乗りあげるような傾斜角30度程度の板が張り付けてある(写真5).高速でコーナを旋回すると遠心力で横転する仕組みである.

写真5 難所その3「ヒルアタック」
これらの難所を切り抜けるには,難所の手前にある白線を検出して走行体のスピードを落とし,コースアウトしないように制御する必要がある.
●課題2:安定したボディを手に入れろ!
本コンテストの規定では,走行体は何を利用してもよい.しかし,基本モデルと同じミニ四駆が低価格で簡単に手に入ることから,全チームともミニ四駆のボディを採用していた.ここで課題となるのは,
- 摩擦の少ないボディを作る
- 難所で横転しない,ぐらつきの少ないボディを作る
- 低重心とすることで,走行の安定化を図る
などである.



Post a Comment