走行消費電力の低さを競うロボコンを開催 ―― Green ET Challenge 2010コンテスト
●課題3:制御回路をどのように改造するのか?
図2に走行体(基本モデル)のブロック図を示す.制御基板は大きく制御器と計測器に分けられる(図3,図4).本コンテストでは,制御器については参加チームが改造してよいことになっている.
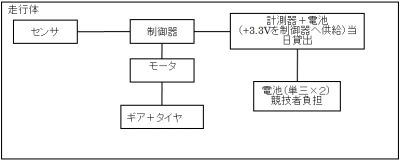
図2 走行体のブロック図
図3 制御器の回路図
図4 計測器の回路図
ここで課題となるのは,
- モータのスパイク・ノイズによるマイコンの誤動作を抑える
- 回生ブレーキの改良・改善
- 低消費電力に向けたマイコン制御回路の増減
などである.ほとんどの参加チームは,基本モデルの制御基板をそのまま改造せずに使用していたが,今回のコンテストでは,スパイク・ノイズに悩まされたチームが多かったようだ.
●課題4:制御ソフトウェアをいかに改良するのか?
PBLの座学では,走行体(基本モデル)の制御システムをUML(Unified Modeling Language)を使って説明した(図5).また,UML表記をどのようにC言語に変換すればよいのかを,「COOL(C-language's Object Oriented Language)」と名付けられたプログラミング手法を用いて説明した.
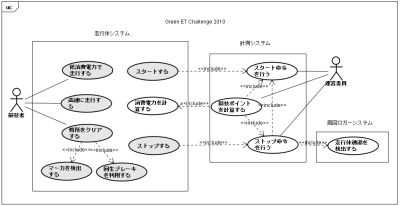
図5 システムのユース・ケース図
制御ソフトウェア開発で課題となるのは,
- 難所を攻略するための走行制御の改良
- 消費電力を抑えるための走行制御の改良
などである.
●ZigBeeで消費電力や周回を通知
本コンテストでは競技をスムーズに進行させるために,計測用のシステムを構成した(図6).システムは大きく,走行体に搭載された計測器と,Javaで作成されたパソコン用プログラムである計測システム,コース上に設置された周回ロガーに分けられる.
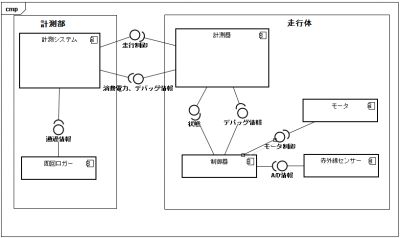
図6 システムのコンポーネント図
計測システムと走行体の計測器は,ZigBee規格の電波で情報をやりとりする.計測システムは走行体に対して,スタート/ストップ命令を送信できる(競技開始時には,運営委員が計測システムの画面から操作して走行体をスタートさせる).走行体は,搭載した計測器で消費電力を計測し,そのデータを1秒ごとにZigBee規格の電波で計測システムに送信する.計測システムは受信した電力値を折れ線グラフに加工してリアルタイムに表示し,同時に積算消費電力を表示する.また,周回数とタイムも表示する(図7).

図7 計測システムの画面
折れ線グラフの赤線が消費電力(W/s)の推移である.青線は,周回を検知したことを示す.
コース上に設置された周回ロガーは赤外線センサ(フォトインタラプタ)を備えており,走行体が周回を重ねるごとに検知して,ZigBee規格の電波で計測システムに通過情報を送信する(図8).計測システムは,走行体が12周走行したと判断すると自動的に走行体にストップ命令を送信し,競技が終了する.
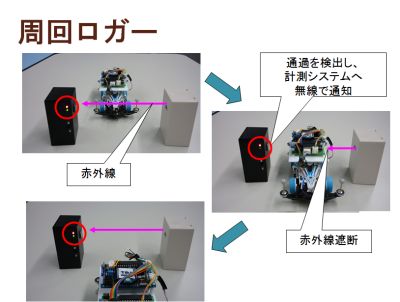
図8 周回ロガーの仕組み
このような競技ではスタートとストップの誤差が大きく影響するため,周回ロガーは大変重要な役割を果たしている.また,運営側が「スタート」ボタンを1回押すだけで競技が始まり,自動的に終了する仕組みとなっているので,競技をスムーズに進行させることができる.



Post a Comment