ロボット・コンテストの計測システムと基本モデル開発記 ――Green ET Challenge 2010の舞台裏
2010年9月18日,ロボスクエア(福岡市早良区)において行われた走行体の消費電力の低さを競うコンテスト「Green ET Challenge 2010」(レポート「走行消費電力の低さを競うロボコンを開催」を参照)であるが,ここではコンテストの舞台裏として,計画から実施に至るまでの経緯を苦労話を紹介する.
●まず,五つの目標を立てた
Green ET Challengeは,2009年度に初めて開催された.2009年度当時は,コンセプト・カーを作成するにとどまった.2010年度にコンテストを行う事になり,次の目標を立てた.
- ボディ系,ハードウェア系,組み込みソフトウェア系の3分野において課題を持たせる
- 課題が多いので,参加者の負担を軽減するために車の挙動の「走る,止まる,曲がる」のうち,曲がるを除去する
- さらに主催側で基本モデルを製作・実装し,その仕組みを教育し,自分なりに改造させることで実践演習を行う
- 参加意欲の向上のために競技にスピード感を持たせる
- トータルの消費電力が少なくなるように競わせる
●試作1号機:公平さが損なわれる致命的な欠陥があった
上記の目標を達成するため,まずは走行体の基本モデルを作成することに専念した.写真1に試作1号機を示す.
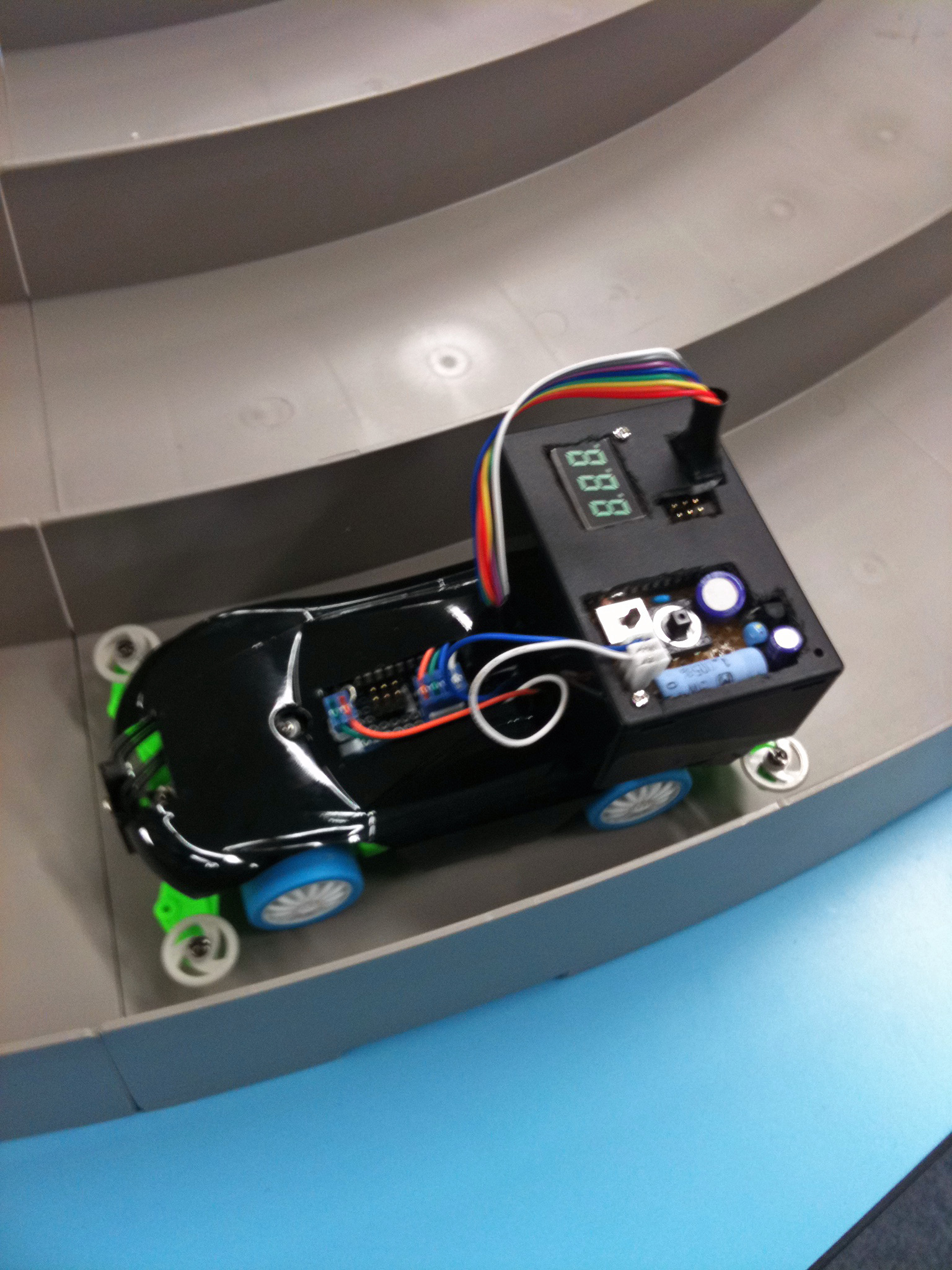
写真1 基本モデル試作1号機
※ 写真をクリックすると拡大できます
この試作機では,ボタン押下のトグル動作で次の動作を行うように設計した.
ボタン押下(発車:LED滅灯) → ボタン押下(停車:LEDに消費電力表示) → ボタン押下(発車:LED滅灯)→ ・・・
試作1号機が完成し動作させたところ,さまざまな障害が発生した.
障害:
- 走行終了後,ボタン押下すると走行体の振動で2度押下する場合があり,消費電力が消えて,また発車してしまう
- 競技終了後,止めるのが遅くなるとその時間も電力を使うので公平さが損なわれる.競技としては致命的
- モータ電源からCPUへ供給していたため,スパイク・ノイズで途中停車する
- 発車時はよいが,停車時は人が物理的に停車させるので,けがの恐れがある
- 反射型赤外線でマーカ検出を行うため,難所のマーカを黒にしていたが,ジャンプした場合も黒と判定してしまう
上記の中には,競技を行う上で致命的なものが含まれている.そこで,設計を見直すことにした.
●試作2号機:難所を攻略できない,坂道を上れない
試作2号機は設計を全面変更し,次のような対策を行った.
対策:
- 無線化の導入.ZigBee規格の無線を使うことで,リモートで発車・停止を制御する
- 動力用電源とCPU用電源を別系統にする
- コースを黒く塗って,白黒特性を逆転させる.難所用マーカも白に変更する
写真2に試作2号機を示す.
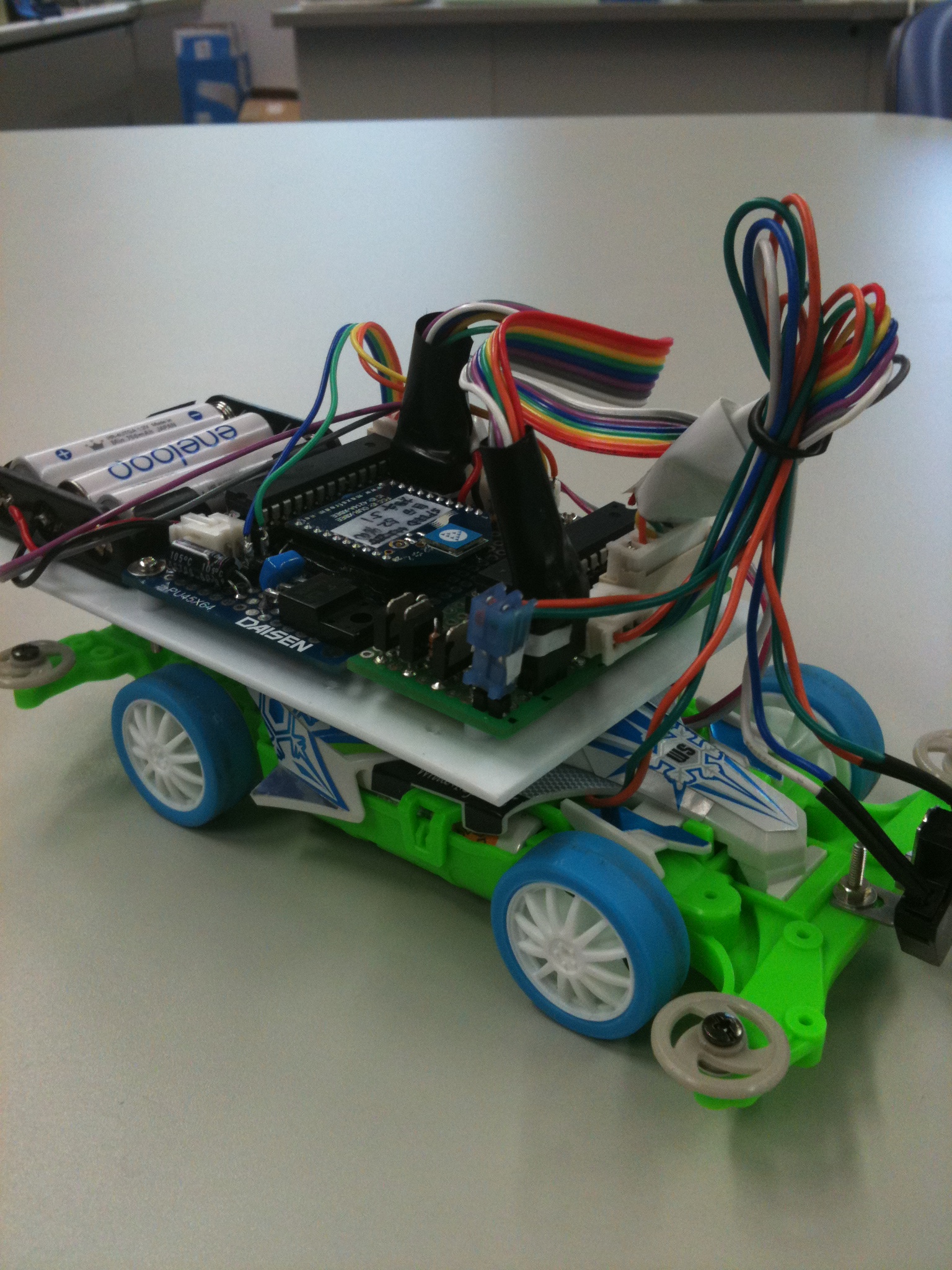
写真2 基本モデル試作2号機
※ 写真をクリックすると拡大できます
試作2号機はうまくいく自信があったが,世の中そんなに甘いものではなかった.さらなる障害が筆者を待ち受けていた.
障害:
- ブレーキ機構がないためマーカ検出後,難所が攻略できない
- 後部に単四電池を3本追加したため,重くなり,スピードが極端に遅くなる.また坂道を登ることができない場合があった
- 競技規定の12周を人手でカウントするのでは,ミスが発生する可能性がある
●完成した基本モデル:ブレーキを設計,電池を軽量化
上記の障害を克服するために,次のような対策を行った.
対策:
- 回生ブレーキの機能を一部流用して,ブレーキを設計
- モータ制御のためのFETの制御用電圧が足りなかったため,FETをもう一つ追加し十分な制御が行えるように改良
- 単四電池から,薄型軽量なディジタル・カメラ用電池へ変更
写真3に完成した基本モデルを示す.
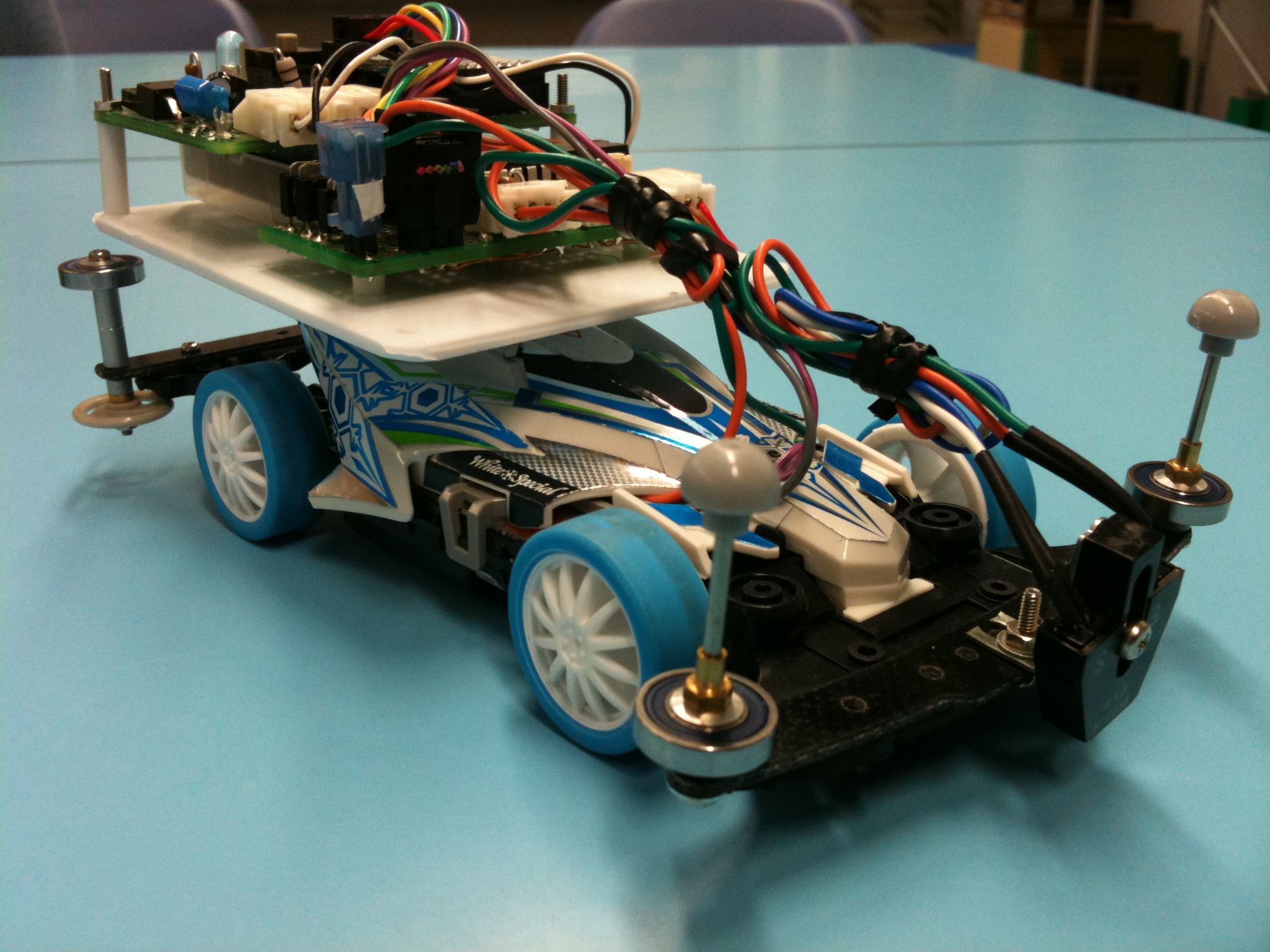
写真3 完成した基本モデル
※ 写真をクリックすると拡大できます
この基本モデルをもとに,プリント基板設計を行った.外部へプリント基板の作成を依頼し,競技者へ供給した.


