iPhoneと組み込み技術で未来を考える(2) ―― 環境情報を取得・再構成してパートナ・ロボットを実現へ
●環境情報の構造化
情報の構造化は,物体情報の空間的な階層化や関係性の抽出とも深く関係します.身の回りにあるモノの空間的な位置関係を把握できれば,「そこのボールを取って」という言葉の意味の理解もロボットにとって容易になります.
図4に環境情報を構造化した空間の例を示します.ここでは,人間のいる位置を中心として,ボール,パソコン,バケツなどの物体の位置関係をグラフ(ノードとエッジからなる,コンピュータが取り扱いやすい数学の一分野)を用いた関係として学習・獲得します注2.この関係性をたどることにより,近くの物体や遠くの物体などを容易に検索できます.例えばロボットがバケツの位置を認識していれば,人間が「水はどこにあるの?」とロボットに質問した際に,近くにバケツがある洗面台やお風呂場などの水道を指し示せます.このように,環境情報を構造化することは,人間の発する言葉の意味の解釈を狭めることに非常に役立ちます.
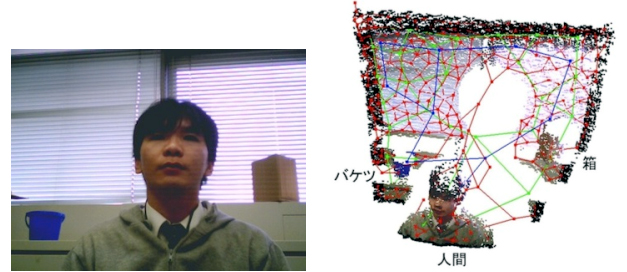
図4 環境情報の構造化の例1
図5に,3次元距離画像センサから得られた床情報を可視化した結果を示します.赤い線で結ばれた領域が床面を表します.ロボットが目標位置に移動するためには,障害物からできるだけ離れながら,最短距離で移動する必要があります.このグラフ構造を用いると,できるだけ安全で,かつ最短の移動経路を探索するのに役立ちます.図5の中の緑色の線が移動経路の候補です.
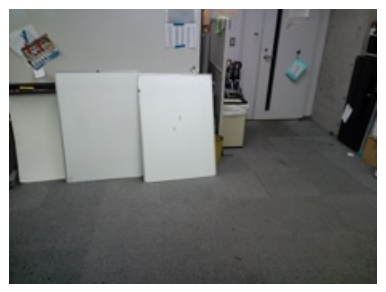
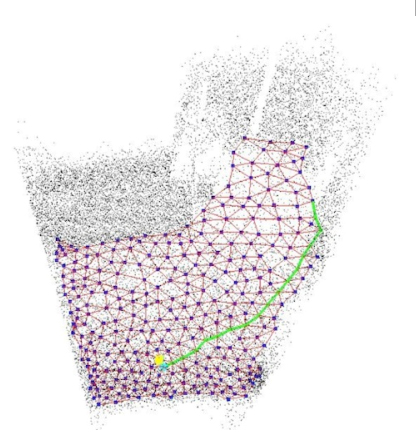
図5 環境情報の構造化の例2
最後に,パートナ・ロボットが認識した人間や物体の情報を可視化したものを図6に示します注3.これは,ロボットが認識した時間が長いほど,また,カメラの画像上で大きく見えるほど,「ロボット」というラベルに近づくように2次元上に表示したもので,パートナ・ロボットや人間が動くと,この関係性も時間とともに変化していきます.この例では,「ロボット」のラベルの近くに,「人間」,「円形」,「速い動作」,「青色」などがあり,精度の上で改善する余地がありますが,例えば,「人間が青い円形のものを持っている」などの状況認識ができます.
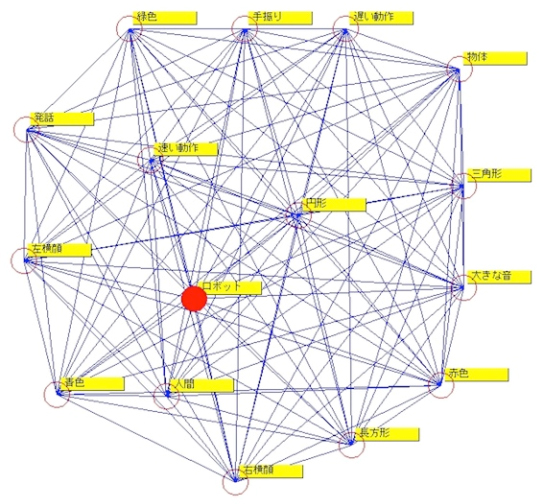
図6 パートナ・ロボットの認識状況の可視化
以上のように,人間と共存する環境を情報として構造化することは非常に有効であり,さらに,これらの情報を可視化することにより,人間の生活が豊かになります.iPhoneは,情報の可視化と,情報へのアクセスのための優しいヒューマン・インターフェースを提供します.質の高い情報の構造化や可視化の精度が上がるにつれ,組み込み技術にかかわる要素技術の革新や高度な統合化が必要になってきます.これらの技術の相互依存的な発展が,パートナ・ロボットの実現を加速させます.
注2:階層型Growing Neural Gasという手法を用いています. |
(第3回に続く)
くぼた・なおゆき
首都大学東京大学院 システムデザイン研究科


