iPhoneと組み込み技術で未来を考える(2) ―― 環境情報を取得・再構成してパートナ・ロボットを実現へ
●情報,ネット,ロボットを組み合わせて3次元環境を再構成
しかし,ロボットに搭載されたセンサだけでは,環境や人間の状態を効率よく認識することは困難です.情報技術,ネットワーク技術,およびロボット技術を有機的に融合することは,ロボット自身の能力を高めるだけでなく,ユーザに対してもさまざまな恩恵を与えることができます.
情報技術は,高速計算や大規模データの活用方法を提供します.ネットワーク技術は,ロボットの外部での計算や計測のための基盤を提供します.例えばセンサ・ネットワークを用いて外部で計測されたデータをロボットが直接受け取るようにすれば,ロボットに取り付けるセンサが最小限となり,ロボットの小型化や省電力化を実現しやすくなります.またこのような環境では,ロボットと人間は共に,各種環境やWeb上の情報へのアクセスが必要不可欠となります.それゆえ,情報の計測・収集・転送,さらには情報を提示するための構造化されたプラットホームが必要となります.
筆者らは,このような情報環境を「情報構造化空間」と呼んでいます(図2). 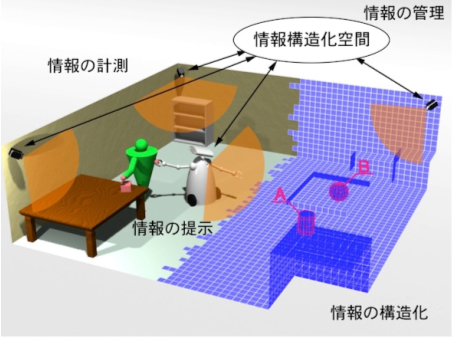
図2 情報構造化空間
現在,筆者らは,実環境で計測された情報を用いながら,実環境とシームレスにつながる仮想環境を実現するための「情報構造化空間」に関する研究を進めています.パートナ・ロボットと相互作用する人間の実環境にできるだけ近い仮想環境を実現するため,ロボットと環境システムが計測したカメラ画像や距離情報を用いて「情報構造化空間」を更新し,3次元環境の再構成を行っています(図3).

図3 カメラ画像と距離画像センサ情報を用いた3次元再構成
このような「情報構造化空間」では,実環境の情報を仮想環境に反映させるだけでなく,環境内のユーザやロボットの行動履歴なども記録されます.さらに,ユーザとの会話に用いられるパートナ・ロボットの発話内容なども,日常のユーザの行動履歴に基づいてWebページが参照され,トピック検索が行われ,発話内容のデータベースに自動的に更新されるとともに,仮想環境内のオブジェクトにタグ付けされます.
以上のように,「情報構造化空間」は,実環境の情報を仮想環境に反映させるだけでなく,Web上の情報をも取り込みながら,ユーザに合わせて組織化されていきます.


