自動車制御におけるモデル・ベース開発の現実 ―― MATLAB EXPO 2009レポート 《ユーザ講演編》
制御システムや信号処理システムなどの設計支援ツールである「MATLAB/Simulink」を開発している米国The MathWorks社の日本法人マスワークスジャパンは2009年12月2日,同社の顧客向けの講演会/展示会「MATLAB EXPO 2009」を東京で開催した.
前回の「基調講演編」に続いて,今回はMATLAB EXPO 2009の目玉となるユーザ講演を中心に紹介する.
MATLAB/Simulinkの重要な用途に,自動車の制御システム開発がある.顧客向けの展示会「MATLAB EXPO 2009」では,トヨタ自動車,三菱自動車工業,日産自動車の大手自動車メーカ3社が,MATLAB/Simulinkを利用したモデル・ベース開発の取り組みの事例を紹介した.
●課題山積のモデル・ベース開発
トヨタ自動車は,最新のモデル・ベース開発の限界と今後の方向性についての展望を示した.「自動車制御システム開発におけるモデル・ベース開発の状況と展望」と題して,トヨタ自動車で理事を務める大畠 明氏が講演した.
現在の制御システム開発工程は,制御ソフトウェアの開発と制御ハードウェアの開発が並行して走る「コンカレント開発」で進められている(写真1).モデル・ベース開発の導入によって現在,実現していることを大畠氏はまとめて紹介した.
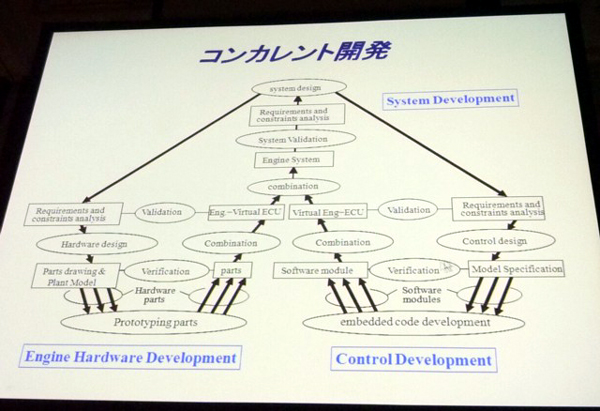
写真1 現在の制御システム開発工程
現在,実現していることは,以下の五つである.
- SILS(Software In the Loop Simulation)を用いたシステム設計
- HILS(Hardware In the Loop Simulation)による不具合の再現率95%以上
- 自動コード生成
- モデル・ベース適合
- 自動検証入力生成
そして,まだ実現できていないこととして,以下の四つを挙げた.
- 制御対象のモデリング
- 制御システム設計
- 検証
- モデル・ベース開発の統合開発環境
大畠氏によると,モデル・ベース開発は効果を上げているものの,モデル・ベース開発エンジニアの数が十分ではなく,その育成が急務になっている.また,モデル・ベース開発の定義と方向性が開発コミュニティで共有されるに至っておらず,制御対象モデルの構築に時間がかかることから,モデル・ベース開発の基盤はまだ脆弱だという.さらに,プラント・モデリングや制御設計,検証の領域で必要な技術が確立されていないと指摘した.
そして現状のモデル・ベース開発は,制御プログラム開発と実装に注目が集まりすぎており,実世界とかい離していることなどを指摘した.また,開発フローに問題を抱えていると述べた.開発フローの問題とは,制御設計ループの中に実装ループ(コード生成と検証)が入り込んでいることである(写真2).制御設計ループと実装ループを分離するのが,今後のモデル・ベース開発の方向性だと主張した(写真3).
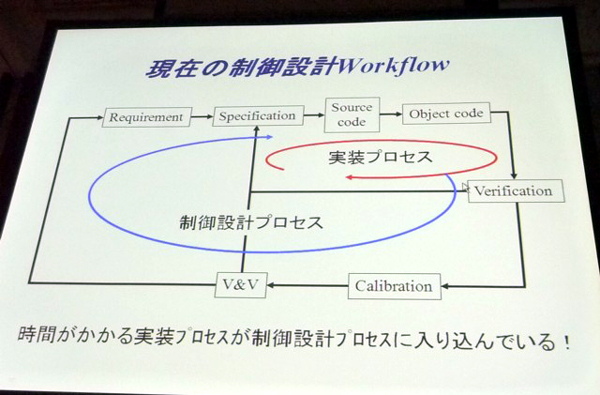
写真2 現在の制御設計フロー
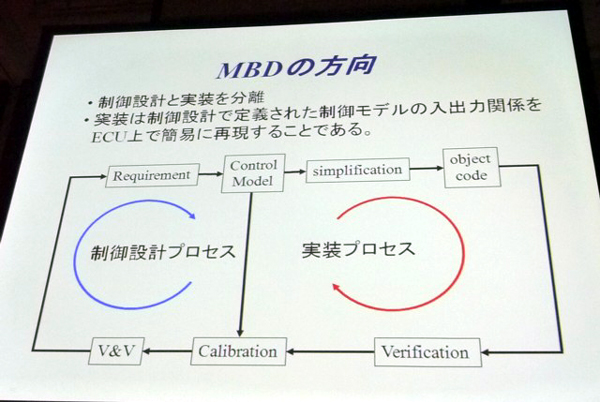
写真3 モデル・ベース開発の今後の方向
さらに,「要求・制約獲得プロセスと制御対象モデル開発プロセスが相互作用するために作業の繰り返しが不可欠である」,「作業の繰り返しが部署間や企業間をまたがるために開発期間が延びてしまう」,「ドキュメント作成作業が煩雑になる,プログラムが急速に大規模になる」,「検証作業工数の見積もりが困難である」,「状況の変化によってはアーキテクチャが破たんして根本から作業をやり直さなければならなくなる」,といった問題が顕在化しているとした.
そこで制御対象モデルの開発プロセスと要求・制約獲得プロセスを明確にするとともに,両者の相互作用を容認し,入出力関係の最適化という方向で実装を再定義する必要があるとの考えを示した(写真4).その際,バーチャルとリアルの関連付けが最も重要だと指摘した.
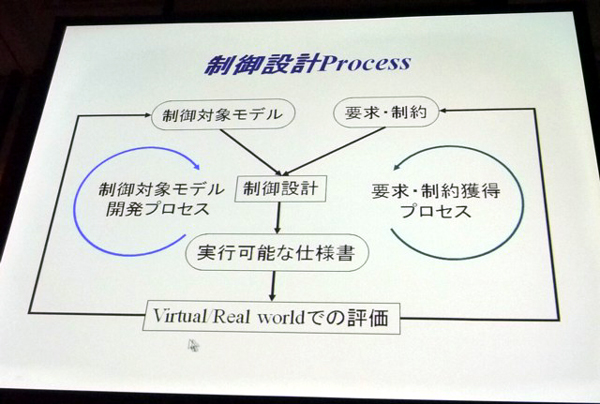
写真4 要求・制約獲得プロセスと制御対象モデル開発プロセス


