掃除機型ロボット制御で組み込みの新分野を切り開け! ―― ESSロボットチャレンジ2013
競技が終了すると,作成された地図データを吸い出して審判席のパソコンに表示し,審査を受けるのだが,この審査がなかなか厳しい(写真7).表示された地図を前に,距離や角度の細部まで確認していくのだ(写真8,写真9).距離や角度が正確でないと地図としての意味を成さないとのことで,地図の完成度は得点に大きく影響を与える.チームによって地図の表現がバラバラであるため,審判も精度の評価には苦労していたようだ.
写真7 審判席で審査を受ける

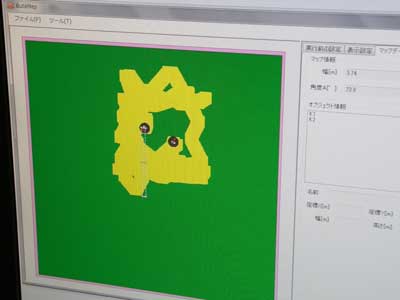
写真8 地図(その1)
大まかだが障害物の位置や角度がついた外壁の形が表示されている.
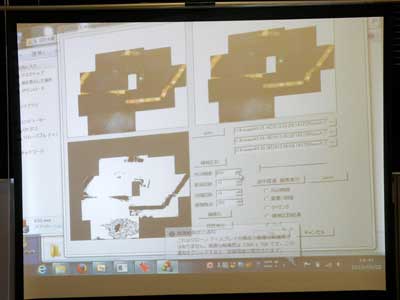
写真9 地図(その2)
こちらは,2台の機体を使って描かれたもの.
ロボットの動きだけを見ていると,一見他愛のない動作の連続であるように思えるが,それらは,ソフトウェア工学に基づいた要求分析と設計,制御工学に基づいた処理動作によって成立している.審判の一人が話していた「システム開発は仮説の構築とその検証の繰り返しが大切」という言葉が印象深かった.
最終的な各部門の順位は以下の通りである.
<コンパルソリ部門>
1位:YSE_Kobuki13(横浜システム工学院専門学校)
2位:でんち(東京電機大学)
3位:芝浦Navi(芝浦工業大学)
<ベーシック部門>
1位:ASMD(九州大学)
2位:こぶ☆たん(東海大学)
3位:SETObuki(南山大学)
●アドバンス部門にはラジコン・ヘリコプタとの連携チャレンジが登場
なお今回,アドバンス部門に参加したのは,チーム「Miw-B1(徳島大学)」のみだった.アドバンス部門の競技内容は基本的にはベーシック部門と同じだが,本部門では,新たな部品(センサやアクチュエータ)の追加やロボットの追加,ロボット以外の物体の設置などが認められている.チーム「Miw-B1」は追加装置として,Wi-Fiで操作可能なフランスParrot社のラジコン・ヘリコプタ「AR.Drone」を用意した(写真10).上空から競技フィールドを撮影し,その画像データを地図としてロボットにコピーして,ドッキング・ステーションのミッションをクリアしようとした.しかし,「AR Drone」による画像撮影と地図データへの変換まではうまくいったものの(写真11),ロボット本体へのデータ・コピーに失敗し,結局,稼動できなかった.
残念な結果に終わったとはいえ,なかなか意欲的なチャレンジだといえる.
写真10 Parrot社のラジコン・ヘリコプタ「AR.Drone」
カメラを搭載しており,Wi-Fi経由で撮影した画像を転送できる.

写真11 「AR.Drone」で撮影した画像を地図データに変換したところ
いその・やすたか


