ヒトとの共存を目指すロボット技術,製品や教材が一堂に ―― 国際ロボット展(iREX 2009)レポート
2009年11月25日~28日の4日間,東京ビッグサイト(東京都江東区)にて「2009 国際ロボット展(iREX 2009)」が開催された(写真1).今回で18回目を迎える本展示会では,「RT次世代への挑戦 ―Challenge for Next―」をテーマに,製造やサービス,教育分野について,ロボット技術や応用システム,および関連機器を扱う企業や団体,大学・研究機関により, 技術や関連製品などが紹介された.特別企画として大学・研究機関による「RT(ロボット・テクノロジー)交流プラザ」が設置され,経済産業省と社団法人 日本機械工業連合会が合同で「『今年のロボット』大賞」を発表した.また,最終日の11月28日には「ロボットアクティブステージ」で2足歩行のロボット・バトル「ROBO-ONE GP」が開催された.主催は社団法人 日本ロボット工業会と日刊工業新聞社.出展社数は192社と64団体・機関,出展小間数は856小間だった.
主に工場や生産現場など製造業の分野で貢献してきたロボット技術は,日常生活の場にも広がりつつある.SR(サービス・ロボット)やRT(ロボット・テクノロジ)として,モノづくり,安心・安全,医療福祉などの分野で実用化が進んでいる.
写真1 会場受付の様子
●人体頭部の組み立てキットや眼球動作ユニットなどが登場
ココロは,人体型ロボット「アクトロイド」,「人体頭部基本(組立)キット」,「カメラ付き眼球動作ユニット」,米国ATR社の開発による遠隔操作システム「キーポン」,案内ロボット「I-FAIRY」の試作品などを展示した(写真2).
人体頭部基本キットとカメラ付き眼球動作ユニットは,同社のロボット研究・教育用の教材である「ヒューマノイド・テックシリーズ(仮称)」として販売される.人体頭部基本キットは機械系の工業高校や大学の学生を対象としている.同キットでは,ロボットの頭部を左右に傾ける,左右の眼球を上下左右に旋回させる,左右のマブタを開閉する,頭部全体を左右上下に旋回させる,口を開閉する,などの操作が可能であり,空気圧シリンダで駆動する.カメラ付き眼球動作ユニットは,主にロボティクス・画像認識などの大学研究室・研究所を対象としている.前述の人体頭部基本キットに組み込み,DCモータを使用して眼球を左右に旋回させることができる.今回,
展示されたアクトロイド「サラ」には,人体頭部基本キットを使用しているという.また,案内ロボットのI-FAIRYは,2010年1月に開催予定のコンシューマ・エレクトロニクスに関する国際展示会2010 International CESにて完成品が展示される予定.

写真2 ココロの人体型ロボット「アクトロイド(サラ)」とその構成要素
人体頭部基本(組立)キットとカメラ付き眼球動作ユニットを搭載する.
●セル生産や物流の仕分け作業でヒトと共存
川田工業は,「ヒトと共存できる作業ロボット」をコンセプトとした製造現場向けの作業ロボット「NEXTAGE」を展示した(写真3).本システムには,アルミニウム合金鋳造のフーレム構造を採用した.首2軸,腰1軸,腕12軸(片腕6軸×2)の合計15軸で構成されており,片腕で最大1.5kgの重さのものを運搬が可能.制御用OSにはQNXを採用する.重量は20kg.

写真3 川田工業の作業ロボット「NEXTAGE」
展示ブースでは,頭部と手部に搭載されたカメラにより,テーブル上のマーカの位置などを把握し,トレイから良品のみを次々に取り出すといったデモンストレーションが行われていた.こうした細かい作業が可能なため,セル生産や物流における仕分け作業などの現場で活用できると期待されている.
●データベースと連携して音声のフレーズを認識
レイトロンは,孤立単語認識方式(フレーズ認識方式)の音声認識を実現する音声認識モジュール「BSRM 01-01E」を展示した(写真4).あらかじめ登録しておいたフレーズを音声で入力すると,音声認識LSIがデータベースの中のからもっとも近いフレーズ群の一覧と各フレーズの尤度値(マッチングの度合い)を算出する.音声認識LSIは,米国Xilinx社のFPGA(Spartanファミリ)に実装した.ホスト・パソコンとのインターフェースは,SPI,I2C,UARTの3種類から一つを選択する.一般的な音声認識と異なるのは,比較的距離が離れていても音声を認識できる点である.30dB程度の騒音レベルであれば,5m~10m離れていても認識が可能.展示ブースでは,本モジュールを搭載した音声認識ロボット「Chapit」のデモンストレーションが行われた.同ロボットは,日本語のほか,中国語,英語も認識できる.
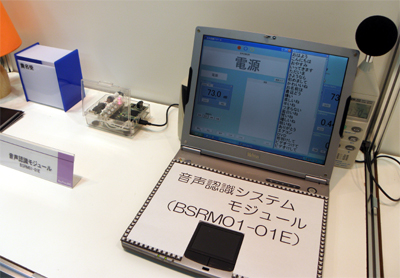
写真4 レイトロンの音声認識モジュール「BSRM 01-01E」
●ロボット教材でAndroid技術者を育成
ナノコネクトは,携帯電話向けのOS/ミドルウェア群であるAndroidを活用した教育カリキュラム「Androidエデュケーション」についての展示を行った(写真5).カリキュラムは,A,B,Cの3コースに分かれており,Aコースではミドルウェアなどの開発,BコースではAndroidアプリケーションの開発,CコースではJavaの基礎知識の学習と,段階を追って学習できるようになっている.Android上で動作するJavaアプリケーションのプログラミングやオブジェクト指向の考え方,XMLを使用したレイアウト作成技術などを習得できる.
こうしたカリキュラムの習得により,Bluetoothを介してAndroidを搭載した携帯電話から「Androidロボット」を操作することなども可能.展示ブースでは,手をあげる,前進するなどの命令を受信して動く「Androidロボット」のデモンストレーションが行われていた.本カリキュラムは,同社の神戸校および大阪校では12月1日から,横浜校でも順次開講を予定している.

写真5 ナノコネクトの教育カリキュラムで利用されるAndroidロボット
●迷路競技を対象にした小型ロボット・キットを販売
アールティは,2009年度に開始されるマイクロマウス競技のあらゆるサイズを1/2にしたハーフ・サイズ迷路を対象とする小型ロボット・キット「ハーフサイズマイクロマウス Pi:Co」を展示した(写真6).本キットでは,モータ・ユニット,センサ・ボード,およびデータ・ロガーなどに使用できるメモリ・カード・スロットを搭載したCPUボードなどをコンパクトにまとめている.学習用の入門機器として,赤外線センサやエンコーダを使用したDCモータの制御実習などに適しているという.また,ルネサステクノロジ製の統合開発環境「HEW(High-performance Embedded Workshop )」とサンプル・プログラムが付属しており,組み込み用のプログラミング学習や研究用途などに活用できるという.パソコンとの接続にはUSBケーブルを使用する.
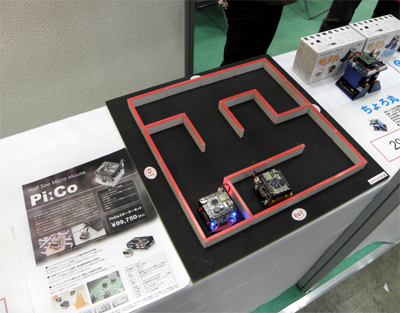
写真6 アールティの「ハーフサイズマイクロマウス Pi:Co」


