水中を泳ぐロボットたちが華麗な演技を披露 ―― OTO'08 Aqua Robot Competition
2008年4月10日,ポートアイランドスポーツセンター(兵庫県神戸市)にて,水中ロボットの競技イベント「OTO'08 Aqua Robot Competition」が開催された(写真1).各チームが水中を移動するロボットを持ち寄り,プールの中に引かれたラインに沿って移動したり,決められたポイントを通過したり,前進/後退,方向転換などのデモンストレーションを行うなどして,ロボットの出来栄えを競った.
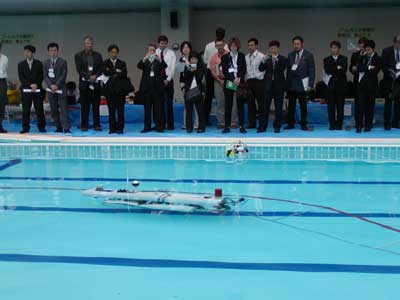
[写真1] OTO'08 Aqua Robot Competition(0045)
本イベントは,水中で活動するロボットの開発を通して,もの作りの面白さや,水中における制御の難しさなどを体感してもらい,ロボット技術に興味を持ってもらうことを目的としている.水中ロボコン推進会議が中心となって開催しており,同種のイベントを2006年から年に2回,神戸と東京にて実施している.今回は,海洋関連の国際学会であるOCEANS'08 MTS/IEEEおよびKOBE-TECHNO-OCEAN'08の併設イベントとして開催された.
●自律制御とバイオミメティック部門
本イベントには,AUV(Autonomous Underwater Veicle;自律型潜水艇)部門とバイオミメティック(Biomimetic;生物の動きを模倣した)ロボット部門の二つが用意された.
AUV部門には,九州工業大学 生命体工学研究科 石井研究室の「Twin Burger」(写真2),東京大学生産技術研究所 海中工学研究センター 浦研究室の「Tri-Dog 1」(写真3),Taiwan Ocean Research Institute (TORI) & Underwater Vehicle and Robotics Lab., National Taiwan Universityの「TORI AUV-1」(写真4)が参加した(事前に8チームがエントリしていたが,輸送中のトラブルなどにより,実際に参加できたのは3チームのみ).

[写真2] Twin Burger
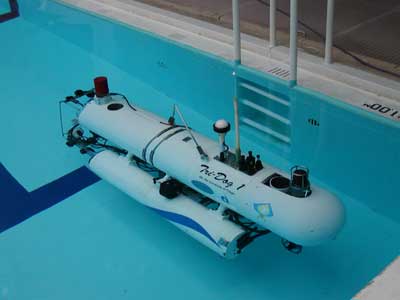
[写真3] Tri-Dog 1
[写真4] TORI AUV-1
自律制御によって決められたポイントを通過するデモンストレーションを行った.はじめは調子良く動いていたが,途中で止まってしまう,ということを何度か繰り返し,最終的に3カ所の通過ポイントを見事クリアした.
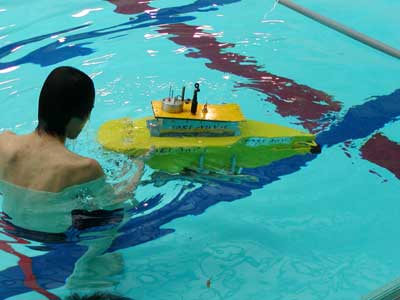
バイオミメティック部門には,胸ひれで動きを制御する大阪大学 大学院工学研究科 加藤研究室の「PLATYPUS」(写真5),大阪府立大学 大学院工学研究科 有馬研究室の水中グライダ型ロボット「ALEX」(写真6),ヘビのような動きを見せる九州工業大学 生命体工学研究科 石井研究室の「Multi link mobile robot」(写真7),イカの動きを模した大阪大学 戸田研究室の「Squid robot」(写真8)が参加した.

[写真5] PLATYPUS
PLATYPUSはカモノハシを意味する.魚の胸ひれに相当するひれを付け,前後や上下にひねったり,回転させたりして移動や姿勢制御を実現している.

[写真6] ALEX
本ロボットはグライダ型であり,生物のような動きをするわけではないのだが,現時点では自律制御ではないのでバイオミメティック部門で参加したという.
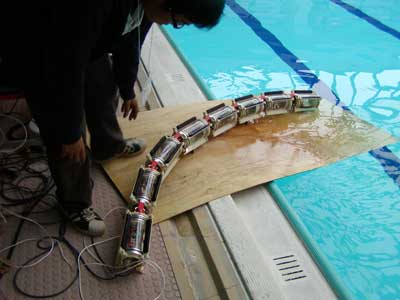
[写真7] Multi link mobile robot
ヘビのような動きで水中を動き回った.有線による遠隔制御を行った.
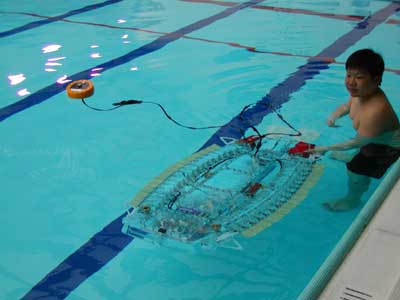
[写真8] Squid robot
通称「イカロボット」.水面に浮かんでいるオレンジ色の半球体は,無線LANアクセス・ポイント(ルータ)に浮きを取り付けたもの.市販の無線LANアクセス・ポイントをそのまま使い,コストを抑えたという.
水中でロボットを制御するには,水圧がかかる,電波を受信できないなどのさまざまな困難がある.今回参加したロボットでは,有線で遠隔制御しているものやアンテナを水面上に立てているものが目立った.
なお,2008年11月1日には,東京辰巳国際水泳場(東京都江東区)にて「'08水中ロボットコンベンションin東京辰巳国際水泳場(水中ロボコンin辰巳'08)」の開催が予定されている.


