マルチコアCPUに対応するボードやリアルタイムOSが続々 ―― 2007 ESC Silicon Valley
●各社がCore 2 Duoボードを展示
Kontron社は,ETXexpress(Com Expressに準拠した組み込みコンピュータのインターフェース規格)に対応したCPUボード「ETXexpress‐CD」を展示した(写真16).本ボードはIntel社のCore 2 Duo(2.2GHz)と945 GMチップ・セットを搭載する.外部インターフェースとして,S-ATA(Serial ATA)やUSB 2.0,1レーンのPCI Express,16レーンのPCI Express Graphics,GビットEthernetなどを備える.価格は1,200ドル程度という.また同社以外にも,米国AMPRO社など各社がCore 2 Duo対応のCPUボードを紹介した.
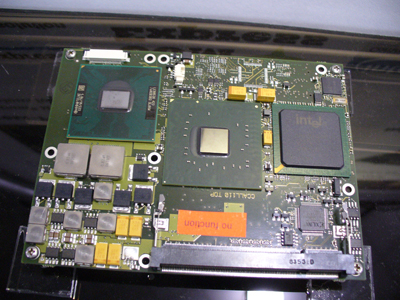
[写真16] ETXexpressの外観
●複数のOSをそれぞれ再起動できるブート・ローダのデモ
ドイツReal-Time Systems社は,一つのCPU上で複数のOSを制御できるブート・ローダ「Real-Time Hypervisor software」のデモンストレーションを行った.例えば,ディスプレイ表示用のLinuxとLEDカウンタを,カウントアップ用のVxWorksと独立に制御できる.Linuxを再起動してもVxWorksは動作し続け,カウントアップは止まらない(写真17).
本ブート・ローダは,一つもしくは複数のコアを持つx86系CPUに対応する.それぞれのOSは,メモリ領域をハードウェア的に分けて使用する.モータ制御やロボットなどの産業機器,超音波測定器やX線測定器などの医療機器,計測機器,車載機器などに利用できるという.

[写真17] Linux再起動中でもVxWorks制御のカウンタがカウントアップを続けるデモンストレーション
●マルチコアCPUとマルチOSに対応した仮想化環境を開発
米国tenAsys社は,Intel社のVirtualization Technology(VT)に対応したCore DuoやCore 2 DuoなどのCPU向け仮想化環境「Real-time Hypervisor」を紹介した(写真18).本仮想化環境を用いれば,一つのCPU上でWindowsやLinuxなどのOSと各種リアルタイムOSを同時に動かせる.リアルタイム・システムとヒューマン・インターフェースが両方必要な,医療機器や計測機器,ロボットなどに利用できるという.OSはそれぞれVM(Virtual Machine)上で動作させる.マルチコアCPUに対応する.

[写真18] tenAsys社のリアルタイムOS「INtime」のデモンストレーション(手前)と「Real-time Hypervisor」の展示(右奥)
●8ビット/16ビット・マイコンに有効なC・C++コンパイラを開発
オーストラリアHI-TECH Software社は,米国Microchip Technology社(以下,Microchip社)のPIC18マイコン用C・C++コンパイラ「PICC-18 PRO」を展示した(写真19).本コンパイラには,同社の新しい「Omniscient Code Generation(OCG)」と呼ばれるコード生成技術を用いている.従来のコンパイラでは,各ソース・ファイルをパーサで構文解析してそれぞれのアセンブリ言語を生成していた.本コンパイラでは,各ソース・ファイルを構文解析した後,ソース全体の関数呼び出しやポインタ・ダイヤグラムを最適化してから,全体のアセンブリ言語を生成する.これにより,ROMやRAM,レジスタの利用効率を向上させ,実行ファイルを小さくできるという.この技術は,特に8ビットや16ビットのマイコンに対して有効である.
本コンパイラは,スウェーデンIAR Systems社のコンパイラと比べて,50%以上生成コード密度が高いという.今後,米国Cypress Semiconductor社のPSoCやMicrochip社のDSPIC,ARMプロセッサなどに順次対応していく予定.

[写真19] HI-TECH Software社のブース
●レゴ・ブロックのようにボードを組み合わせる組み込み開発環境
米国Eridon社は,「uCards」と呼ばれるボードをレゴ・ブロックのように組み合わせて,組み込みシステムを設計できる開発環境「UnifiedLogic」のデモンストレーションを行った(写真20).uCardsには,CPUを搭載したメイン・ボードや,USBやEthernet,シリアル,CAN,DVIなどのインターフェースを搭載した各種ボードがある.
本ボード群を利用すれば,組み込み機器のハードウェア試作を開発する必要がなくなり,設計期間が短縮できるという(写真21).uCardsをメイン・ボードに接続すると,「Eridon IDE」という開発ツールが自動的にどのようなuCardsが接続されたかを認識する.この開発ツール上で,LinuxやeCosなどのOS上で動作するソフトウェアを開発できる.
PowerPCやMicroBlazeなどのCPUに対応する.メイン・ボードは,128MバイトのフラッシュROMと32MバイトのSDRAMを備える.
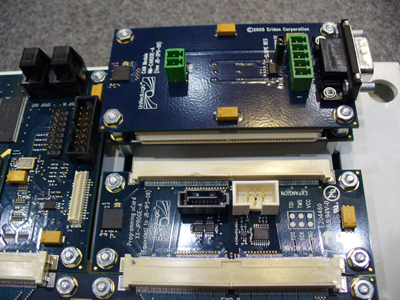
[写真20] uCardsとuCardsの結合部分
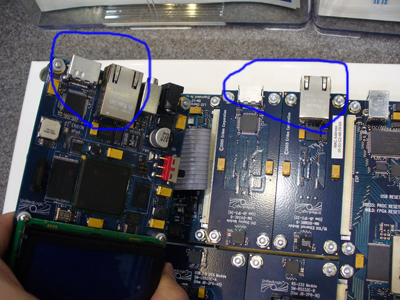
[写真21] UnifiedLogicを用いて開発した液晶表示器(写真左)と,UnifiedLogicのボード群(eCards,写真右).青で囲った部分の形状がほぼ同じ
●10Mバイト/sでデータ転送を行えるデバッガ用プローブを展示
米国Green Hills Software社は,データ転送速度10Mバイト/sのデバッガ用プローブ「Green Hills Probe V3」を展示した(写真22).32ビットや64ビットのARM,MIPS,PowerPCなどのプロセッサに対応する.データ量の多い画像伝送などのデバッグに利用できるという.ボード上のNOR型フラッシュROMへの書き込みが行える.JTAGなどのポートにフル・アクセスできるPythonスクリプト言語に対応する.設計から製造までの各フェーズで利用できるという.

[写真22] Green Hills Probe V3の外観
●消費電流を従来品の半分に抑えた32ビット・マイコンのデモ
米国Atmel社は,消費電流を従来品の半分程度の40mA(66MHz,80Dhrystone MIPS時)に抑えた32ビット・マイコン「AVR32 UC3」のデモンストレーションを行った(写真23).本マイコンは,「AVR32 UC Core」と同社が呼ぶCPUコア内部にSRAMを備える構造を採用している.内部バスについては,六つの32ビット・バスをソフトウェアで切り替えることで,競合することなく伝送できるようにした.これにより,命令セットのパイプライン処理を従来の4~5サイクルから3サイクルに短縮できた.実行コードを削減することで,低消費電力を実現できたという.
Ethernetインターフェースと最大64KバイトのSRAM,最大512KバイトのフラッシュROMを備えるAシリーズと,最大32KバイトのSRAMと最大256KバイトのフラッシュROMを備える廉価版のBシリーズを用意する.どちらもUSB-OTG(On-the-Go)やSDRAM,I2Cなどの外部インターフェースを備える.産業用のモータ制御や空調制御などに利用できるという.開発キットも用意している.
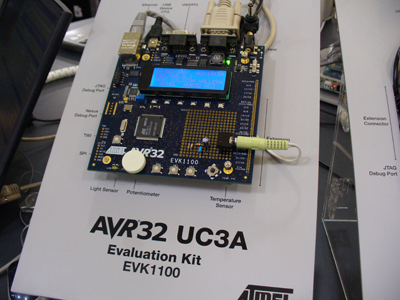
[写真23] AVR32 UC3A評価キットを用いたデモンストレーション
●A-D変換器のシリアル出力に挿入するプログラマブル・フィルタ
米国Quickfilter Technologies社は,最大512タップのFIRフィルタをプログラムできるフィルタIC「QF1D512」やその開発キット「QF1D512 SavFIRe」のデモンストレーションを行った(写真24).本フィルタICの入出力は,12ビット~24ビットのシリアル・ディジタル・データ.A-D変換器のシリアル出力と,DSPなどのディジタル信号処理部の間に挿入して使う.最高サンプリング周波数は500kHz.ディジタル・フィルタの係数は32ビット.オーディオ機器やセンサ機器,産業用機器の制御などに利用できるという.
本フィルタICに書き込むタップ係数の設計は専用ツールで行う.タップ係数は,マウスでフィルタ特性を手書きして計算させたり,希望のパラメータやフィルタの種類を選んで計算させたりできる.本フィルタICのコンフィグレーション・インターフェースはSPI(serial peripheral interface).動作温度範囲は-45℃~+85℃.外形寸法は3mm×3mm(写真25).

[写真24] QF1D512 SavFIReのデモ
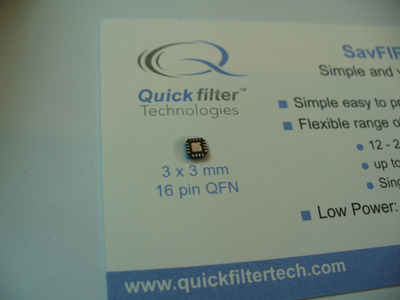
[写真25] QF1D512の外観
●USB制御のジャイロ・センサ付きGPSモジュールを展示
米国Trimble Navigation社は,GPSレシーバ・モジュール「Copernicus」とジャイロ・センサ付きGPSレシーバ・モジュール「Lassen DR+GPS」を展示した(写真26).Copernicusの水平位置分解能は8m(90%),高度分解能は16m(90%),速度分解能は0.06m/s,位置更新周期は1Hzである.対応チャネル数は12.受信感度は-152dBm.UARTなどの外部インターフェースを備え,NMEA(National Marine Electronics Association)などのプロトコルに対応する.消費電力は94mW(標準値).外形寸法は19mm×19mm×2.54mmと小型.プロトコル・スタックなどのソフトウェアなどが付属したスタータ・キットを用意する(写真27).
Lassen DR+GPSはジャイロ・センサや速度センサを備え,GPS信号の受信条件が悪いときでも位置を補正する.水平位置分解能は5m,高度分解能は10m,速度分解能は0.02m,位置更新周期は1Hzである.USBターゲットのインターフェースを備え,NMEAなどのプロトコルに対応する.消費電力は190mW(標準値).外形寸法は32mm×66mm×8.5mm.

[写真26] Lassen DR+GPSの外観

[写真27] Copernicusのスタータ・キット
●C言語と同等の速度で動作する組み込み向けJava VMのデモ
米国Aonix社は,組み込みシステム向けのJava VM(virtual machine)「PERC Pico」を用いて,JavaのソースがC言語と同等の速度で動作するデモンストレーションを行った(写真28).PERC Picoは,小さいフット・プリントでメモリを効率良く利用するように特化して開発されているという.
本VM上で動作するJavaプログラムは,通常のJavaコンパイラでコンパイルできる.「PERC Ultra」と呼ばれるVMと組み合わせて使うことで,通常のJavaライブラリを高速で動作させられるという.本VMはx86系CPUに対応し, WindowsとLinux上で動作する.今後,ほかのプロセッサやリアルタイムOSに対応していくという.

[写真28] PERC Picoを用いたマンデルブロ集合の描画デモンストレーション
●OpenGLを用いた携帯端末用グラフィックス・アクセラレータを展示
米国Hooked Wireless社は,OpenGL ES(組み込み向けのOpenGL)ベースの携帯端末向けグラフィックス・アクセラレータ・ソフトウェア「The Hooked Media Player」のデモンストレーションを行った(写真29).LinuxやWindows Mobile,SymbianなどのOSに対応する.計測器の表示部分やGPSなどの携帯端末,最近グラフィックス機能の高性能化が進むIP電話端末の表示部などに利用できるという.必要なメモリ容量は250Kバイト~500Kバイト程度だという.
[写真29] The Hooked Media Playerを用いた動画のデモンストレーション
●コード生成効率を30%以上向上したDSP開発環境を展示
米国National Instruments社は,米国Analog Devices社のDSPであるBlackfinファミリに対応した, GUIベース・システム設計ツールの最新版「LabVIEW Embedded Module for Blackfin Processors 2.0」のデモンストレーションを行った(写真30).本設計ツールを用いると,GUIベースでBlackfinファミリのDSP用のソフトウェアが設計できる.
本バージョンは,今までのバージョンと比べてコード生成効率が30%以上向上したという.本設計ツールは,数学演算や解析,信号処理などを行える140以上の関数を備える.オーディオやビデオなどで使うD-A変換器やA-D変換器,CODECなどのI/Oを持ち,オンチップ・デバッギングに対応する.評価キットも用意しているという.

[写真30] ロボット・アームの信号処理をBlackfinで行うデモンストレーション
tag: CPU, ESC, OS, エコロジ, コンピュータ, ボード, モジュール, ワイヤレス, 自動車, 開発環境


