ロボットや医療機器などへの応用を想定したセンサとモータに注目が集まる ――第15回 モーション・エンジニアリング展
2006年4月19日~21日,幕張メッセ(千葉市美浜区)にて,開発設計者・生産技術者のための総合展示会「TECHNO-FRONTIER 2006」が開催された.その中の一つとして,機械要素・部品・システムに関する展示会「第15回 モーション・エンジニアリング展」が開催された(写真1).会場では,ロボットや医療機器,ゲーム機などへの応用を想定した展示が多く見られた.例えば,ロボットの指先の力を検出するタッチ・センサやロボットの関節で利用可能な小型半球面モータによる多自由度アクチュエータなどが展示され,来場者の注目を集めた.

[写真1] 第15回 モーション・エンジニアリング展の会場内
2006年4月19日~21日,幕張メッセで開催された.
●手の動きを10個の変位センサで捉えるグローブ
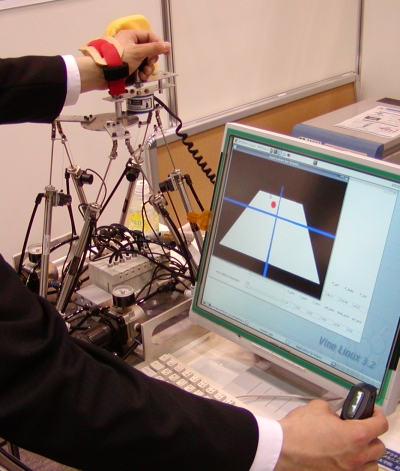
リベックスは手の動きをキャプチャし,モニタに3次元(3D)表示できるデータ・グローブ「ROMAN Glove R2」を展示した(写真2).同社が開発した極細ワイヤによる10個の変位センサ「ワイヤ イン パルスコーダ」(変位量は10mm)と,韓国NT Research社が開発したリアルタイム3次元表示ソフトウェアから構成される.一つの手に対して10個の指関節のセンシングが可能.同社では,手話分析や遠隔操作,医療,ゲーム機,人型ロボットなどでの利用を見込んでいる.
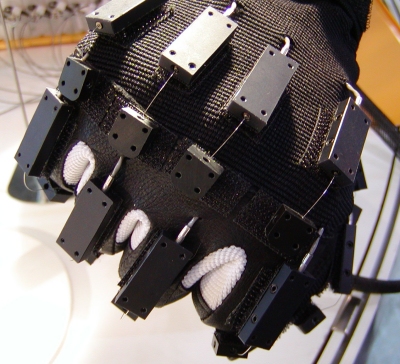
[写真2] 変位センサを10個搭載したデータ・グローブ
●半球面モータを2個搭載した多自由度アクチュエータ
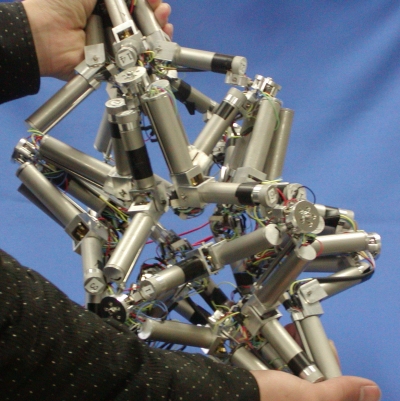
産業技術総合研究所(産総研) 知能システム研究部門と安川電機は,小型球面モータによる多自由度アクチュエータを展示した(写真3).同社では,人型ロボットのひじ関節などでの利用を見込んでいる.
X軸方向とY軸方向に半球面のモータ(可動範囲は180°)を1個ずつ搭載する.アクチュエータには,ACサーボ・モータを2個使用したタイプとステッピング・モータを2個使用したタイプの2種類がある.ACサーボ・モータの保持トルクは,外側のモータが0.07Nm,内側が0.008Nm,位置決め精度は外側が0.879°,内側が0.16°.また,外形寸法は75mm×74mm×61mmである.ステッピング・モータの保持トルクは外側が0.2Nm,内側が0.03Nm,位置決め精度は外側,内側とも0.01°.また,外形寸法は70mm×70mm×68mmである.3年後を目安に,まずACサーボ・モータ・タイプを実用化する.
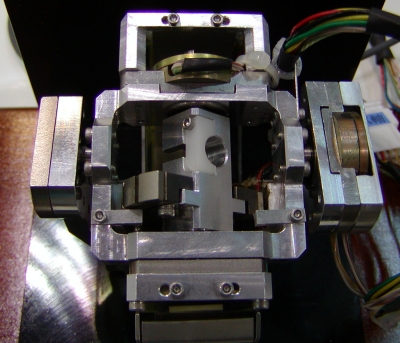
[写真3] 半球面モータを2個搭載した多自由度アクチュエータ
写真はACサーボ・モータ・タイプ.銅色の部分はロータリ・エンコーダ.
●指先に加わる力をXYZ方向で捉える触覚センサ
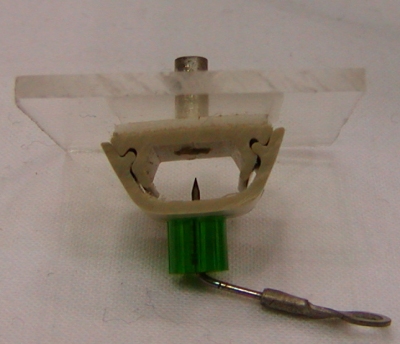
名古屋大学大学院 大岡研究室は,XYZ方向の力を検出できる触覚センサを展示した(写真4).同研究室ではロボットの指先などでの利用を想定している.
本センサは,42本の突起をもつシリコン・ゴムやゴムの裏側に配置されるアクリル板,アクリル板の裏側に取り付けるCCDイメージ・センサ,外部光源からの光をアクリル板に均一に分配・入光する数十本の光ファイバ,CCDイメージ・センサから得られた画像を解析するボードとソフトウェアから構成される.力の検出では,アクリル板に押しつけられたシリコン・ゴムの面積(押しつけられたところが明るくなる)を,CCDイメージ・センサで読み取る.約2N(値はゴムの構造などで可変)までの力を検出できる.
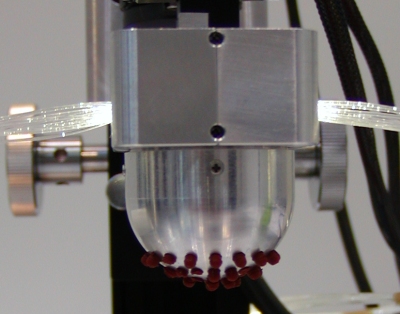
[写真4] XYZ方向の力を検出できる触覚センサ
感度はシリコン・ゴムの構造で変えられる.
●デジカメのAF機構に採用された超音波モータ
慶應義塾大学 前野研究室は,超音波モータを展示した.DCモータに比べて低速で高いトルクが得られる.そのため,減速機などが不要となり,小型・軽量化が可能である.例えば,ロボットの指関節や手術用の鉗子などに利用できる.また,ディジタル・カメラのAF機構に採用された実績がある.
モータは,用途に合わせてさまざまな形状のものを用意できる.写真5に示す手のモデルでは,1本の指で5Nの持ち上げトルクを出力可能.1関節の応答性は10Hz以上,4関節では5Hzである.
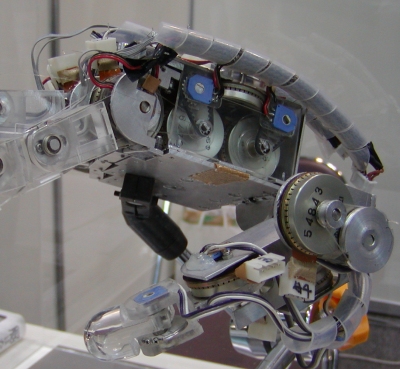
[写真5] 各関節に超音波モータを搭載した手のモデル
DCモータに比べて低速で高いトルクが得られる.そのため,減速機などが不要となり,小型・軽量化が可能である.
●枕をひねる,引っ張るなどの力を検出できる力覚提示装置
岡山大学大学院 鈴森・神田研究室は,力覚提示装置を展示した(写真6).30本の1軸アクチュエータと30個のモータを組み合わせた20面体により,例えば両手で枕をひねる,引っ張る,押さえつけるなどの分散した力を検出できる.同研究室では研究が進めば,ゲーム機やリハビリ支援装置などへの応用が期待できるとする.
アクチュエータは本装置のために開発したもので,米国Cypress Semiconductor社のPSoCマイコン「CY8C27243」やモータ・ドライバ,計装アンプ,同研究室で開発したマイクロ力センサなどを搭載している.
[写真6] 30本の1軸アクチュエータと30個のモータを組み合わせた力覚提示装置
●6本の空気圧シリンダによる手首のリハビリ支援装置
岡山大学大学院 則次研究室は,手首のリハビリ支援装置を展示した(写真7).6本の空気圧シリンダをStewart Platform型(パラレル・メカニズムの一つ.各シリンダには伸縮だけで曲げの負荷がかからないため,剛性が高い)に組み合わせることで,XYZ方向の運動とその軸を中心とした回転運動を発生させる.手根骨を押し込みながら手首を屈曲・伸展させるという,通常,理学療法士が行っている動作を再現できるという.
本装置はパソコンのプログラムや専用のコントローラなどで制御可能.発生トルクは,X軸,Y軸,Z軸方向にそれぞれ±61N,±54N,±104N,X軸回り,Y軸回り,Z軸回りにそれぞれ±5.9Nm,±5.1Nm,±10Nmである.
[写真7] 空気圧シリンダを使った手首のリハビリ支援装置
6本の空気圧シリンダをStewart Platform型に組み合わせた.
●ノート・パソコンの冷却に応用できる電界共役流体
東京工業大学 横田・吉田研究室は,電界共役流体(ECF:electro conjugate fluid)を展示した.ECFは水よりも粘性があり,およそ数kV,数μAの電圧・電流を加えることで活発な流動を発生する.例えば,写真8(a)のような専用のECFポンプを使えば,ECFを写真8(b)のように押し出せる.また,写真9のように電極間に高電圧を加えることで,モータを形成できる.トルクは数μN程度.ノート・パソコンの冷却液への応用などを見込んでいる.
(a)ECFポンプ
(b)ECFポンプを使いECFを噴射しているようす
[写真8] ECFに数kVの電圧を加えると活発な流動を発生する

[写真9] ECFによるモータ
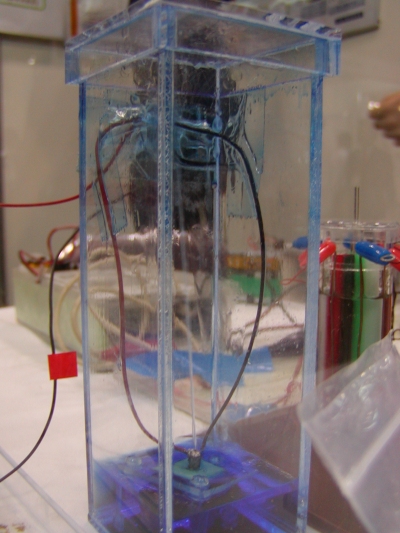
●静電誘導で動くアクアリウム・ロボットを展示
東京大学 樋口・山本研究室は,静電誘導を利用したアクチュエータで動作するアクアリウム・ロボットを展示した(写真11).このうち,魚の形をしたロボットはリニア型のアクチュエータを用いており,泳ぐ方向を左右に変えられる.アクチュエータの大きさは15.7mm×17.6mm×0.16mm.推進力は43mN.印可電圧は2kV.同大学では,これらのアクアリウム・ロボットを開発するベンチャ企業を2年後に立ち上げる計画.

(a)リニア型の静電アクチュエータを用いた魚のロボット
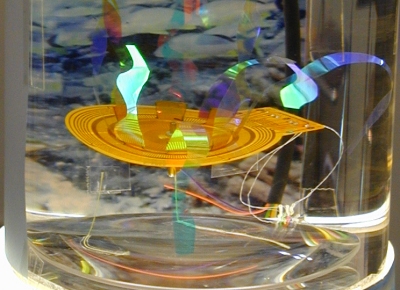
[写真10] 静電アクチュエータの外観
(a)では,2枚の電極が位置関係を変えることにより,魚が左右に向きを変える.(b)は,内側と外側で回転速度を変えてある.
tag: TECHNO-FRONTIER


