40チームのUMLモデルとロボットが対決 ――第3回 UMLロボットコンテスト
コンテストが開催された翌日の2004年4月14日,UML Forum/Tokyo 2004において「UMLロボットコンテスト パネル討論:モデリングから実走まで」と題したパネル・セッションが開催された(写真5).コンテストの結果を受けて,モデル審査を行った審査委員と最優秀モデルとして評価されたチーム「KERM」の福田和也氏(東横システム)が討論に参加した.有用なモデルを作成するためには,今までのUMLモデルでは表現しきれていないものをモデルに盛り込む必要があるのではないか,という意見に大半のパネリストが同意を示した.

[写真5] パネル・セッションのようす
UML Forum/Tokyo 2004の1セッションとして開催された.
●走行コースをモデル化できたチームが高い評価を受けた
まず最初に,コンテストにおけるモデルの審査基準について審査委員長の渡辺博之氏(オージス総研)が説明した.審査基準は大きく「モデルの外観(見せかた)」と「モデルの中身」に分けられ,それぞれ表1の三つの観点で審査した.この審査基準のうち,外観に問題があったチームはほとんどなかったが,中身について,論理的な正しさを示すようなモデルを提出したチームも一つもなかった.「そういう意味では,今回のモデルはみなデッサン・レベルだった」(渡辺氏).
[表1] モデルの審査基準
| 外観 | a)文法的に正しい表記か |
| b)見やすいか | |
| c)(モデルの外観に)オリジナリティがあるか | |
| 中身 | a)オブジェクト指向の観点からモデルの各要素が妥当か |
| b)論理的に正しいモデルか(モデルを見ただけで「これなら確かに動く」と思えるか) | |
| c)オリジナリティがあるか(アルゴリズムがユニークか) |
また,コンテストは今年で3回目になるが,年々走行コースが複雑になってきており,それにつれてモデル化するべき範囲が変わってきているという.「コースをトレースして完走することだけをモデル化しても,今年は勝てなかった.コースの複雑性を理解し,モデル化する必要があった.モデル評価で入賞した上位4チームはすべてそうだった」(渡辺氏).
モデルを高く評価された福田氏は「コースをどう扱うかは悩んだポイント.コースはこれからもつねに変化するだろうから,再利用可能なかたちで実装したいと考えた.それなら,コースを普遍的に抽出してモデル化しようと,CourseMapというクラスを用意した」とコメントした.
●速く走るための技術はモデリングの技術にあらず?
なぜ,モデル評価の高いチームのロボットがかならずしも速く走れないのか,という疑問について,審査委員の平鍋健児氏が以下のような仮説を披露した.「一口に"速いロボット"と言うが,走りが安定している,トレースするセンサの振り幅が小さい,など複数の要素がそろって初めて,レースで勝てるロボットが生まれる.また,加速しすぎるとウィリーする(前輪が浮き上がる)ことや,電池の残量が変化すると光センサの反応がどうなるのか,タッチ・センサの反応がどうなるのかなどは,与えられた問題の文面からはわからない.試行錯誤の体験や要素技術がレースの勝敗に結びつくのだが,どのチームもそれらをUMLのボギャブラリで表現できていない.だから,速く走るチームと優秀なモデルのチームが一致しない」(平鍋氏).
「設計の本質は技術的な関心ごとを分けていくこと.分析を深める途中経過で,技術要素の発見があり,それを設計に盛り込んでいくものだ(写真6).その,経験から学んだ"勝つ理由"を来年はぜひモデルに表現してほしい」(平鍋氏).
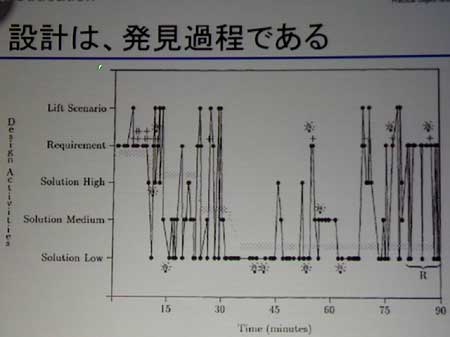
[写真6] 設計は発見過程である
エレベータの設計過程を図示したもの.豆電球の印のある箇所でそれぞれ新たな発見があったという(Reimond Guindonの"Designing the Desin Process"より).
渡辺氏も「最近,しごとの中で同じようなことを考えることが多い」と同意した.「UMLで表現する上のレイヤとして"目的"があり,下のレイヤとして"手段"があるが,本当はその間に"しくみ"があるのではないかと考えている.しくみとは,アイデアであり,ノウハウにあたるもの」(渡辺氏).
審査委員の太田 寛氏(富士ゼロックス)は,2002年の第1回のロボット・コンテストに参加した経験を持つ.「自分自身が参加したとき,やはり"しくみ"の部分がいちばん難しかった.勝つためのモデルで重要なのはより正確にモータを制御することだが,ふだんのしごとの中ではそういうことをやっていない.しくみをきちんと分析し,モデリングできるチームがあれば,モデルも優秀だし,スピードも速いロボットになるのではないか.ただ,難しいのはモデルとして抽出する作業自体ではなく,速く走らせるためにパラメータをいかに設定するか.それは実測のトライ&エラーであり,モデルとは直接関係ないことになりそうだ」(太田氏).

[写真7] パネリストの方々
左から,渡辺博之氏(オージス総研),太田 寛氏(富士ゼロックス),萩原裕志氏(キャッツ).
審査委員のLeon Starr氏(米Model Integration社)は,モデルと走行結果の不一致について,システムの複雑度を理由として挙げた.「実務レベルでの複雑なシステムでは,ドメイン(問題領域)の分離がもっとも重要なのだが,このコンテストで扱っているような小さなシステムでは,センサやアクチュエータ,戦略などをドメインとして分離してモデル化することがそれほどの効果を生んでいないのではないか.コースがどんどん複雑になってくると,そうやって分離することがメリットになっていくのではないか」(Leon Starr氏).
関連リンク
・UMLモデルと走行タイムを競うロボット・コンテスト開催 ――第2回UMLロボットコンテストレポート


