40チームのUMLモデルとロボットが対決 ――第3回 UMLロボットコンテスト
2004年4月13日,青山テピア(東京都港区)において,LEGO MINDSTORMSで作成したロボットの走行タイムとUML(unified modeling language)モデルを競う競技会「第3回 UMLロボットコンテスト」が開催された(写真1).複雑な要素を持ったコースをどう走りきるか,各チームがくふうをこらした.ロボットの動きをアリや犬にたとえてモデル化したチームもあり,観客の注目を集めていた(写真2).

[写真1] 第3回 UMLロボットコンテスト
40ものチームが熱戦を繰り広げた.
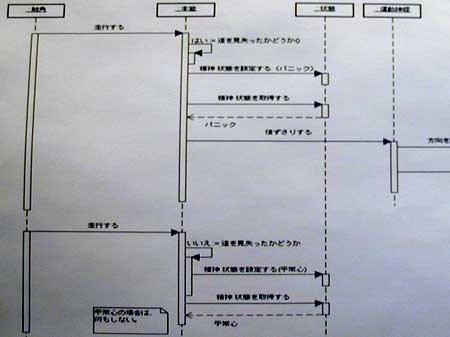
[写真2] チーム「侍麗心愚」のUMLモデル(例外処理を説明したシーケンス図)
ロボットをアリにたとえ,フェロモンを追跡する行動(線のトレース)を理性パターン(通常処理)と本能パターン(例外処理)に分けて分析していた.
ロボットは,黒い線をトレースしながら直線とカーブが混在するコースを2周走る.途中には坂道や破線で描かれた近道がある.線のトレースは光センサで判別しながら行っており,室内の明るさや電池の残量など,さまざまな要因の影響を受ける.そのため,1周目は成功しても2周目で失敗したり,予想外の場所でコースから外れてしまうロボットも多かった.ロボットが完走すると,観客から拍手がわき起こった.
※ここをクリックすると,36秒07という走行タイムで優勝したチーム「ムンムン」のレースのようすが再生されます(約5Mバイト,AVI形式).
●今年もモデル図の評価とレース結果は一致せず
「コースが複雑になり,モデル化の必然性が高くなっているから,今年こそはモデルとレースの相関関係が完全一致をみるはず(つまり,良いモデルのロボットが速い)」と審査委員長の渡辺博之氏(オージス総研)が断言したにも関わらず,今年もモデルとして高く評価されたチームは上位入賞できなかった.また,モデルとして最優秀賞(エクセレント)を受賞したチーム「KERM」のメンバが,「実は,モデル図はあのように書きましたが,時間がなくて一部は実装していません」と暴露するひとコマもあった(写真3).

[写真3] チーム「KERM」のUMLモデル(クラス図)(クリックすると拡大します)
コースのパターンはこれからもどんどん変わると考えて,「CourseMap」というクラスを用意したという.
審査委員の平鍋健児氏(永和システムマネジメント)は,「ロボットのようなリアルタイム制御では,フィードバックが遅れるほど制御が難しくなるので,レース結果はUMLモデルが良いかどうかではなく,いかにすばやく制御できているかにかかっているように思う」とコメントした.
●完成度の高いモデルは問題領域のとらえかたが違う
審査委員長の渡辺氏によると,「問題領域のとらえかたによって,モデルの完成度に差が出ていた」という.問題として「線をトレースする」ことしかとらえていないと,今回のような複雑なコースに十分に対応したモデルを作成できない.コースの複雑性を理解し,「コースに適応した走行をする」ことを問題ととらえてモデル化していたチームが完成度の高いモデリングを行っていたという.優れたUMLモデルは,おおむねコースをうまくモデル化した点やモデルの粒度が適切な点,モデルがわかりやすい点などで高く評価されていたようだ(写真4).
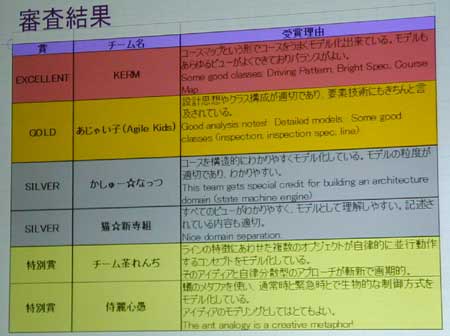
[写真4] 評価の高かったUMLモデルの評価理由
コンテスト終了後の表彰式にて,審査委員長の渡辺氏が評価理由を公開した.
このUMLロボットコンテストは,オブジェクトテクノロジー研究所(OMG日本代表)が主催する「UML Forum/Tokyo 2004」の特別企画として開催された.同コンテストの実行委員会 実行委員長の二上貴夫氏によると,今年(2004年)は秋にも情報処理学会ソフトウェア工学研究会が主催する「組み込みソフトウェアシンポジウム 2004」の併催イベントとして同コンテストを開催する.こちらでは,飛行船の模型を使った3次元空間におけるロボット・コンテストを予定している.


