全国から選抜された50チームが組み込みソフトの性能と設計を競う ―― ETロボコン 2007 選手権
2007年7月14~15日,ソフトウェアの走行性能と設計モデルを競う小型自走式ロボットのコンテスト「ETロボコン 2007 選手権」が東京都内で開催された.14日に開催された競技会には関東,東海,関西の地区予選を通過した合計50チームが出場し,ライン・トレースの走行タイムを競った(写真1).15日に開催されたワークショップでは,今年初めての試みとして,モデル解説ツアーやモデリングのポイントについて議論するミニ・ワークショップが実施された.

[写真1] ETロボコン 2007 選手権 競技会の様子
競技会は,ディファ有明(東京都江東区)にて開催された.
本コンテストで使用するライン・トレース・ロボットは,LEGO MINDSTORMS注1を使って作成されている.ロボットの形状や使用する部品(ブロック)は競技規約で定められており,各チームは組み込むソフトウェアで勝負することになる注2.
注1;デンマークLEGO社が開発したブロック・キット.CPUを内蔵するブロック(RCXと呼ばれる)を中心に,各種センサを内蔵するブロックや,モータ・ブロックなどが用意されている.ブロックを組み上げることで,プログラムで制御できるロボットを作成できる.プログラムは,赤外線通信などを利用してパソコンからダウンロードする.
注2;実際には,モータ・ブロックやセンサ・ブロックなどの個体差もロボットの性能に影響する.また,ロボットを駆動する電池の種類や状況もロボットの性能に影響するが,競技会で使用する電池は競技会当日に各チームとも条件の同じものが提供される.
●安定した環境で完走率5割を達成
14日に行われた競技会(走行部門)で優勝したのは,東海地区から出場したチーム「De La Gracias(ユニブレーン)」.コースをスムーズに走行し,平均ラップ・タイム注3は20.23s(ボーナス・タイムを加味しない値).
2位と3位のチームは,走行タイムがまったく同じ(平均ラップ・タイムは20.35s)だったため,競技終了後に異例の再レースを行って順位を決定した.2位となったのはチーム「あずまひろしはじめました(東洋ソフトウェアエンジニアリング)」,3位はチーム「IRC(アイテック阪神)」である.
注3;競技会では,イン・コースとアウト・コースという2本のレーンがあり,それぞれを2周ずつ走る.ここでは,両コースの走行タイム(ボーナス・タイムを加味しない値)を合計して4で割り,ラップ・タイムとして算出した.
会場となったディファ有明(東京都江東区)は,格闘技の試合などに利用されるイベント・スペースである(写真2).天井が高く,多数の照明器具で光を調節しやすい環境だったためか,ライン・トレース・ロボットは昨年度の大会と比べてコースを認識しやすかったようだ.その結果,50チーム中18チームが2回とも完走した.全体の完走率注4は51%だった.
注4;50チームが2回ずつ走行しているので,(完走回数)/(50チーム×2)で計算している.

[写真2] 会場となったディファ有明
格闘技を中心としたイベント・スペースである.
今年のコースは,昨年度(ETロボコン2006)とまったく同じ形状だった.そのためか,コース中の難所「Zクランク」(逆Z字型のあい路)を見事通過したチームは12チームにのぼった.また,ゴール後停止注5を鮮やかに決めるチームもあり,観客から喝采を受けていた(写真3).ただし,これらの技を決めたチームが2回とも完走することはなく,素直にコースを2周したチームが走行部門の上位を占める結果となった.
注5;コースを2周してゴール・ゲートをくぐった後,ゴール・ゲート以降50cm以内のコース上で停止すると,ボーナス・タイムをもらえる.

[写真3] ゴール後Uターンしてメロディを流しながら戻ってきたチーム「ADoniS(アドヴィックス 制御第1技術部)」
映画「となりのトトロ」のオープニング・テーマをちょうど1曲鳴らし終わったところでゴール後停止した.
●参加型ワークショップで交流深まる
設計モデルの審査(モデリング部門)で最優秀モデル(エクセレント・モデル)に選ばれたのは,チーム「なんだいや(仮)(リコーソフトウエア プロダクト事業部 鳥取開発センター)」だった.モデルとしてのバランスの良さや,モデルに図解を併記した分かりやすさなどが評価された(写真4).
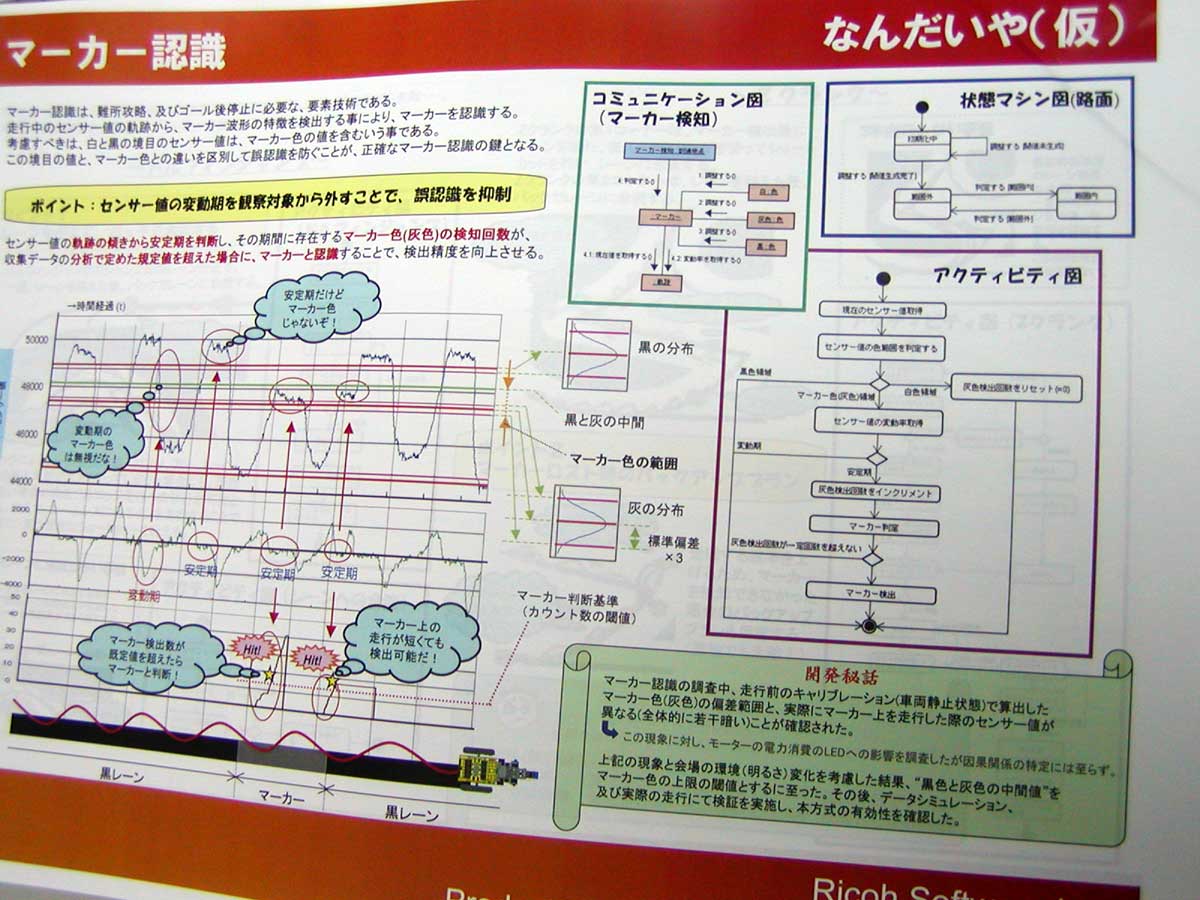
[写真4] エクセレント・モデルに選ばれたチーム「なんだいや(仮)(リコーソフトウエア プロダクト事業部 鳥取開発センター)」のモデルの一部(クリックすると拡大する)
設計の詳細までが見やすく書き込まれている.
ゴールド・モデルに選ばれたのはチーム「AEK RUNNER2007(アンリツエンジニアリング)」.何を目的として設計するのか,という点から検討を始め,避けるべき状況をミス・ユース・ケースとして表現するなどの独自性が評価された.そのほか,指定した角度と距離でドルフィン・ジャンプできるように設計したチーム「Dolphin6(日本大学 工学部)」がシルバ・モデルを受賞した.
15日に墨田リバーサイドホール(東京都墨田区)で行われたワークショップでは,審査員による上位モデルの講評が行われた(写真5).また,今年初めての試みとして,審査員によるモデル解説ツアーや「モデルの妥当性とトレーサビリティを考える」などのミニ・ワークショップ,モデリングについて何でも相談できるコーナなどが設けられた.参加者たちは,思い思いに興味のあるコーナに集まり,指導役の審査委員や参加者と議論を深めていた(写真6~写真8).

[写真5] ワークショップ全体の様子
台風直撃の可能性もある中,多数のチームがワークショップに参加した.

[写真6] モデル解説ツアーの様子
ワークショップ会場の壁には,ETロボコン2007 選手権に参加した50チームのモデルが張り出されていた.それらのモデル図を眺めながらポイントを解説するツアーが実施された.審査委員たちがツアー・ガイド役を務めた.

[写真7] ミニ・ワークショップの様子
「品質をモデリングしよう,技法を駆使しよう」,「モデルの妥当性とトレーサビリティを考える」,「オブジェクトの抽出,クラス図をうまく描くには」,「マインドマップの設計への有効利用」という四つのミニ・ワークショップが開催された.それぞれ20人前後が集まり,議論を深めた.

[写真8] モデリング相談所の様子
自分のチームのモデル図を持ち込んで,じっくりと話し込む相談者と審査委員.


