ルネサス,SuperHファミリを制御用途中心の「SH++」とデータ処理中心の「SH-X」に統合 ――第2回 SuperHオープンフォーラム
ルネサス テクノロジは,同社が主催するセミナ「SuperHオープンフォーラム」の講演の中で,今後のSuperHマイコンの展開について説明した.SH-1とSH-2は自動車,民生機器,産業用機器の制御をターゲットとする「SH++(コードネーム)」として,SH-3とSH-4は携帯機器や情報機器のデータ処理をターゲットとする「SH-X(コードネーム)」として,それぞれ統合していくという(写真1).
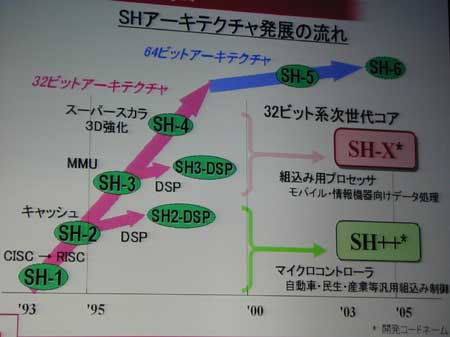
[写真1] SuperHのロードマップ
SH-5やSH-6といった64ビット・アーキテクチャについては,開発が別会社(米国SuperH社)であるため,そのロードマップには触れなかった.
ルネサス テクノロジは,大学などの研究機関に対してSuperHを活用した研究を支援する「SuperHフォーラム」という活動を実施している.今回開催したSuperHオープンフォーラムは,SuperHフォーラムに参加している研究機関の成果発表の場である.本セミナでは五つの大学が,ロボットや入力装置などの開発プロジェクトの詳細を発表した.
SuperHフォーラムに参加する研究機関は,SuperHマイコンのサンプル・チップや開発ツール,リファレンス・ボードなどの提供を受けられる.活動を開始した1998年から現在までに,約30の大学の研究室が本フォーラムに参加しているという.
●32ビットSuperHは二つのアーキテクチャに集約
ルネサス テクノロジ SOP事業部 副事業部長の赤尾 泰氏は,今後のSuperHマイコンの展開について説明した(写真2).これまでは次々と新機能を搭載し,多様化の一途をたどってきたSuperHマイコンだが,今後は統合の方向に向かうという.SH-1とSH-2は自動車,民生機器,産業用機器の制御をターゲットとする「SH++」として,SH-3とSH-4は携帯機器や情報機器のデータ処理をターゲットとする「SH-X」として,それぞれ統合する方針.

[写真2] 発表を行うルネサス テクノロジ SOP事業部 副事業部長の赤尾 泰氏
SH-Xは,マルチメディア処理などの速度を重視している.例えば,カー・ナビゲーション・システムなどへの適用をねらっている.まずは,0.13μmルールのCMOSプロセスで製造する.動作周波数は最大400MHz.2005年ごろに,90nmルールのCMOSプロセスで製造するSH-Xを出荷するもよう.動作周波数は600MHz以上を予定している.
パイプラインの段数は7段.命令セットには「SH 32ビットISA」を採用し,SH-1~SH-4の上位互換にするという.また,オプションとして,DSP(ディジタル信号処理プロセッサ)ユニットやFPU(浮動小数点演算ユニット)を選択できるようにし,従来のSH-3 DSPやSH-4との互換性を維持する(写真3).
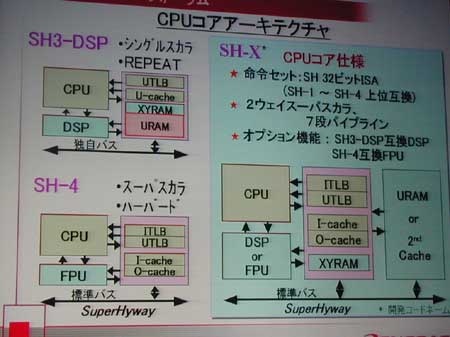
[写真3] SH-Xのアーキテクチャ
命令セットはSH-1~SH-4の上位互換.オプションとしてDSPまたはFPUを選択できるようにしており,従来のSH-3 DSPやSH-4との互換性を維持する.
同社はSH-XをシステムLSI向けのCPUコアとして位置づけている.従来のようにオンチップ・デバッグ機能を内部に組み込むのではなく,バスをモニタする機能を使って外部からデバッグできるようにする.
SH++は,割り込み処理の応答性を重視している.そのため,パイプラインを5段に抑えた.また,レジスタ退避用の専用メモリを各割り込み優先レベルごとに用意し,割り込み時にはレジスタの内容を自動的に一括退避させる.動作周波数は200MHzを目標とする.プログラム容量の増大に対応するため,100MHz動作のフラッシュ・メモリを備える.32ビット長の命令なども新たに追加する.自動車エンジン制御などへの適用をねらっている.
年内には,SH++やSH-Xを搭載した製品を発表できる予定だという.
●RoboCupサッカー用ロボットから「人間の役に立つロボット」へ
岐阜大学工学部 応用情報学科の山本和彦氏は,SH-4を使って開発したロボットについて講演した.山本氏らが開発したロボット「ながら2」は,2002年度に行われたロボット・コンテスト「ロボカップ2002福岡・釜山(RoboCupサッカー)」のヒューマノイド部門でグランド・チャンピオンに選ばれた(写真4).

[写真4] 「ながら2」が歩くところ
審査の課題であるサッカーを行わせるために下半身の動作を重視して作った.画像認識機能も自分たちで開発しており,コンテストの現場の明るさに合わせた調整をその場で行えたことが勝因だったという.ロボットの運動制御に採用したマイコンはSH-4.何種類かのマイコンを使って並行して開発を行い,いちばん結果のよかったものを採用した.高速なわりに消費電力が小さいこと,開発環境が整っていたことなどを高く評価した.
このロボットは,ロボカップで審査される課題をこなすことを最優先に作られたが,現在の研究課題は「人間の役に立つロボット」の開発であるという.特に,人物の認識や表情の学習を行うための画像認識技術の開発に重点を置いている.その一つが,人の動きを見てまねる"見よう見まね"ロボット「Yamato」である(写真5).カメラで取り込んだ画像から人間の肩やひじの位置を検出し,その動きをまねる.ロボットに動作を教えるために,人間の体にセンサなどの器具を取り付ける方法もあるが,日常生活の中で使うためには,こうした方法は現実的ではないと考えたという.
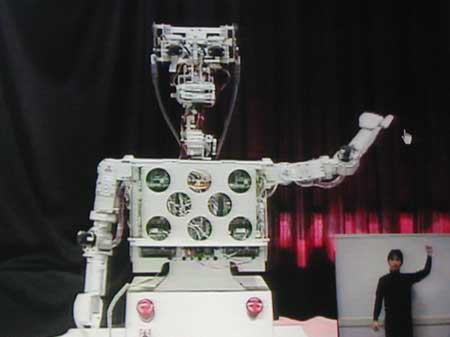
[写真5] "見よう見まね"ロボット「Yamato」
対象となる人物と同じポーズを取っている.カメラで取り込んだ画像から人物の肩の位置を検出し,それに基づいてひじの位置を計算している.
また,視野に入った人物を,すでに学習している人物の中から特定し,相手に合わせて会話する試みも行っている(写真6).さらに,FOMAなどの無線通信技術を利用した家庭内ロボットの開発にも取り組んでいる.
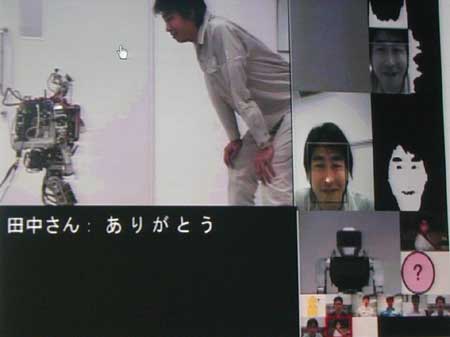
[写真6] 人物を特定し,対話するYamato
相手を「田中さん」であると認識し,「田中さん」と話しかけている.Yamatoはロボットなのだが,研究している側もだんだん愛着が湧いてくるという.
●仮想のものに「触れる」ユーザ・インターフェース装置
東京工業大学 精密工学研究所の佐藤 誠氏は,触覚を再現しながら仮想空間内のものを動かせるユーザ・インターフェース装置「SPIDAR(SPace Interface Device for Artificial Reality;スパイダーと発音する)」とSPIDAR制御装置を発表した.同氏はすでに10年近くSPIDARの開発に取り組んでいる.
最初に開発したSPIDAR-Iは,3本の糸で釣られた1個の指輪だった.力は,3方向から張られた糸の張力で表現する.指輪に指を入れると,ディスプレイに表示された立体物にあたかも触っているかのような感覚が得られる.立体物を変形させることもできる.その後,毎年新しいSPIDARを開発した.指輪の数が増えると複数の指を使った動作を実現できる(つまむ,つかむなど).また,画面内に手を表示することにより,いっそう操作がしやすくなったという(写真7,写真8).しかし,指輪の数が増えるほど,糸の数が増え,脱着に時間がかかるようになってきた.
そこで,2002年に開発したSPIDAR-Gでは,球状の物体を中央に吊るし,それを動かすことにより,ディスプレイに表示された物体を動かしている感覚を得る方式にした.

[写真7] SPIDAR-8の模式図
1本の指輪を3本の糸で引っ張っている.両手の8本の指に指輪を装着するので,合計24本の糸が装置内に垂れ下がることになる.

[写真8] SPIDAR-8を操作しているところ
複数の糸が交差しているので,脱着に時間がかかる.
SPIDAR制御装置「ハプティック・コントローラ」にはSuperHマイコンが組み込まれている(ハプティックとは,「力覚提示」という意味).
関連リンク
SuperHフォーラムの説明
http://www.renesas.com/jpn/products/mpumcu/32bit/sh/forum/
「ロボカップ2002福岡・釜山」における岐阜県工業会の2足歩行ロボット「ながら」が最優秀ヒューマノイド賞を受賞(岐阜県科学技術振興センターのホームページ内)
http://www.stp.pref.gifu.jp/htmlstpc/grp21/robocup/robocuptop.htm
SPIDARの研究を行っている佐藤・小池研究室のホームページ
http://sklab-www.pi.titech.ac.jp/


