10cm立方の人工衛星開発でシステム全体を学ぶ ――第3回 SuperHオープンフォーラム
2004年8月24日,ルネサス テクノロジと日立製作所は「第3回 SuperHオープンフォーラム」を開催した.SuperHプロセッサ(SHマイコン)を活用した大学などの研究機関による研究成果が発表された.学生による人工衛星の開発や,眼球運動神経系に基づいたロボットの開発などの取り組みが紹介された.
●失敗に学べる小型衛星プロジェクトを紹介
東京大学 大学院工学系研究科 助教授の中須賀 真一氏は,中須賀研究室で開発し,2003年6月に打ち上げた小型人工衛星「CubeSat XI-IV(サイ・フォー)」について発表した(写真1).CubeSatとは,外形寸法が10cm×10cm×10cmで,重さが1kg以下の小型人工衛星である.CubeSat XI-IVは15,000画素のCMOSカメラを搭載している.地上からの要求に応じて128×120ピクセルの画像を撮影し,データを地上に送信する(写真2~4).打ち上げ高度は820km.打ち上げから1年が経過した現在も順調に運用されているという.

[写真1] 発表した中須賀 真一氏(東京大学 大学院工学系研究科 助教授)
中須賀氏は,東大阪宇宙開発協同組合(SOHLA)が2005年に打ち上げる予定の人工衛星「まいど1号」の開発にも協力している.
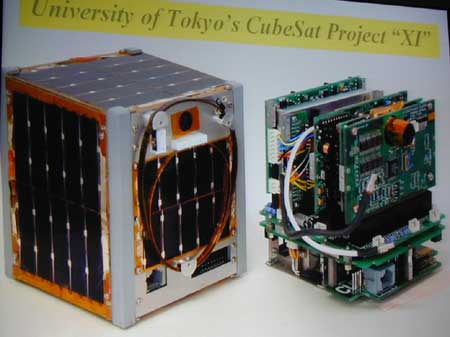
[写真2] CubeSat XI-IVの外観
CubeSat XI-IVの開発ストーリが,UNISEC(University Space Engineering Consortium)のWebサイト内に「東京大学CubeSat XI-IV物語」として掲載されている.
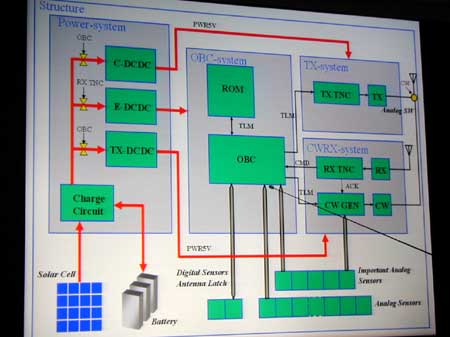
[写真3] CubeSat XI-IVの模式図
OBC(On-board Computer)とは,衛星を制御するプロセッサのことである(XI-IVではPICマイコンを使用).姿勢制御は,永久磁石を用いた受動制御としている.

[写真4] CubeSat XI-IVから撮影した地球の画像
打ち上げから日がたち,調整が進むにつれてきれいな画像を撮れるようになってきたという.データの送受信にはアマチュア無線帯電波を利用している.XI-IVで撮影した画像を希望者に無料で配信するなどのサービスを提供している.
宇宙で使用する部品は,放射線の影響や熱に強い特性が求められる.中須賀研究室では,民生品の中から,宇宙の放射線に強いプロセッサを選んでいる.XI-IVではPICマイコンを採用したが,後続の小型人工衛星プロジェクト「PRISM」ではSH-2を採用する予定.
現在,打ち上げられている人工衛星はどんどん大型になってきており,軽いものでも500kg程度,重いものは4tに達する.そうなると,多額の費用(1機あたり数百億円)と4~7年の開発期間,数百人の開発人員が必要となり,失敗したときの損失がばく大になる.そのため,宇宙工学分野では新しい試みに挑戦しづらくなっているという.そこで,民生品を利用した小型の人工衛星を開発することにより,開発期間や費用を抑える(1~2年,数百万~数千万円)ことを考えた.
また,教育という観点からも,学生が衛星プロジェクトのすべて(ミッションの構想から打ち上げ,運用まで)を経験でき,開発した衛星からの撮影画像などのフィードバックを得られたり,プロジェクト管理を経験できるかっこうの教材となっているという.
CubeSatは,もともと1999年に米国Stanford UniversityのRobert Twiggs氏が教育を目的として提案したものである.その提案を受けて,大学やベンチャ企業,宇宙機関など,60以上の団体がCubeSatの開発を進めている.その中でいちばん最初に開発を終えたのが東京大学(中須賀研究室)と東京工業大学(松永研究室)である.2003年6月30日に,ロシアのロケットの打ち上げサービスを利用して打ち上げを行った.
●眼球運動をロボットに応用
東京工業大学 精密工学研究所 助教授の張 暁林氏は,眼球運動を模擬したロボットの目の運動制御システムについて発表した.眼球運動神経系のしくみを制御システムに取り込み,「動くものに注目する」,「首を右に動かすと目は左を向く」などの特徴を再現した.眼球が動くロボットや監視システムへの応用を考えている.すでに研究が進んでいる画像認識などと組み合わせたシステムの実用化を検討している.

[写真5] 監視カメラ制御システム
特定の対象に注目するカメラのほか,広範囲を写す(人間で言うと,視野の広い)カメラを装備している.動くものを追いかけるシステムになっている.人間の眼球運動と同等の機能にするため,画像認識技術と組み合わせて「興味を持ったものに注目する」機能を実装したいと考えている.
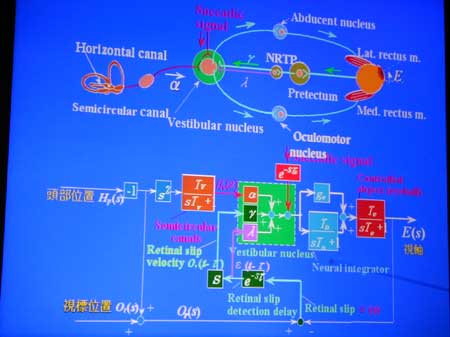
[写真6] 単眼モデルの構成
眼球運動をつかさどる神経系(単眼)のモデル.
●ハードとソフトの分割を手軽に試せる教材を開発
仙台電波工業高等専門学校は,SH-3マイコン(SH7709S)とFPGA(Virtex XCV100)を搭載した教育用ボード「カメレオンSH3」のデモンストレーションを行った(写真7).システムのうち,どの部分をハードウェア(FPGA)として実装し,どの部分をソフトウェア(SH-3に搭載するプログラム)として実装するかなどを試行できる.現在,開発ツールと合わせて16万円程度で販売している.
今後は,μITRON OS(TOPPERS/JSPカーネル)の搭載や,FPGAなどの規模を抑えた廉価版(10万円以下)の製品化を予定している.
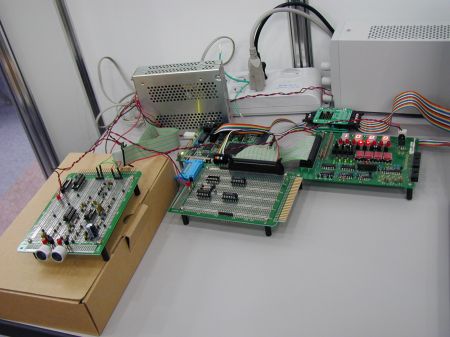
[写真7] カメレオンSH3のデモンストレーション
中央奥にあるボードが「カメレオンSH3」.左のボードの手前に超音波センサが取り付けてあり,対象物までの距離を計測して,右側のインターフェース・ボードの7セグメントLEDに表示している.
関連リンク
・レポート:ルネサス,SHを制御用の「SH ++」とデータ処理の「SH-X」に統合(第2回 SuperHオープンフォーラムレポート)
http://www.kumikomi.net/article/report/2003/25shf/01.html


