手巻きモータ+自作カートに回生技術を組み入れて:速く走るより"長い距離"を走れ! ~「CQ EVミニカート・レース」11月に千葉で開催~
今年(2014年)5月5日に秋田県大潟村で「CQ EVミニカート」と「CQブラシレス・モータ&インバータ・キット」を用いた1メイク・レースが行われましたが(このレース報告は『トラ技Jr.』2014年7・8月号に発表),今度はこの秋11月16日(日)に千葉県袖ヶ浦市のレーシング・コースでも「CQ EVミニカート」の1メイク・レースを行うこととなりました.ここではその概要を示します.
●1周2.4km,高低差12mの難コースを攻略せよ!
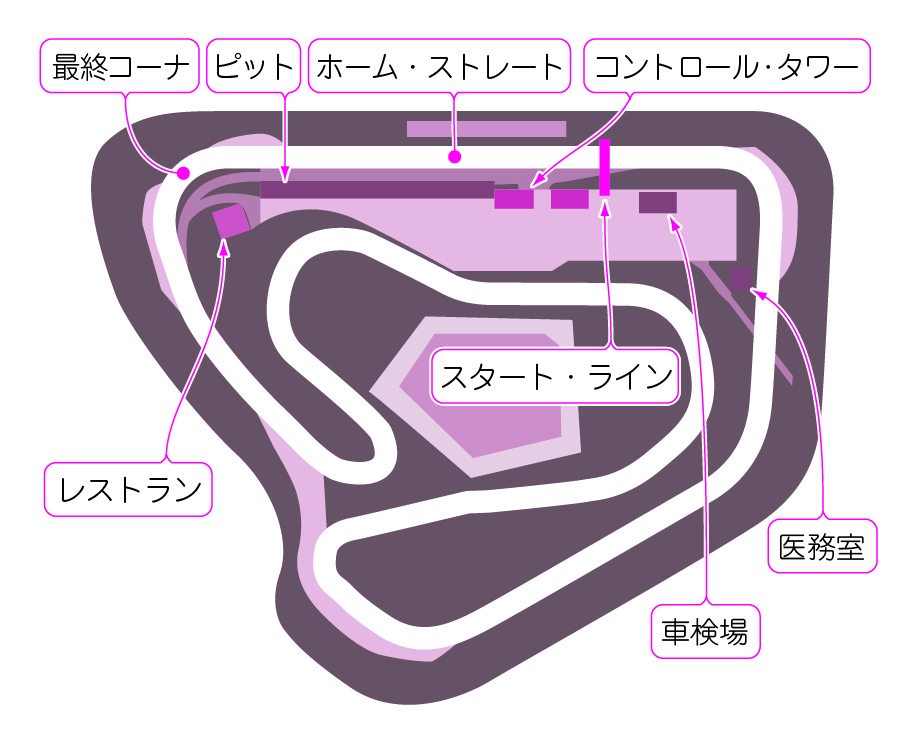
このレースは,日本電気自動車協会(略称:JEVRA)主催のEVレース「2014 ALL JAPAN EV-GP SERIES 」の第6戦の中で行われます(写真1).会場の「袖ヶ浦フォレスト・レースウェイ」は,1周2.4kmのJAF公認のレーシング・コースです(図1).場所は,東京湾アクアラインを東京から渡り終えた近くにあります.
今年5月にEVミニカート・レースが行われた秋田県大潟村の「ソーラースポーツライン」が干拓地にあるほぼフラットの直線コース主体のレース場であったのに対し,この袖ヶ浦のコースは,コーナ数14,最大斜度4.2%,高低差12m,長い登り坂と長い下り坂があるEVミニカートにとってはちょっと厳しいコースです.
ということで,袖ヶ浦のレースに参戦する場合は,秋田のレース用とは異なるモータのチューンナップが必要だと思われます.もちろん,レース規約も異なりますので注意が必要です.
写真1 ALL JAPAN EV-GP SERIESの市販EVによるレースの様子(袖ヶ浦フォレスト・レースウェイ)
.jpg)
図1 袖ヶ浦フォレスト・レースウェイのコース・マップ
●レース規約
正式な競技規約(レギュレーション)は8月29日までに発表の予定です.詳細は,JEVRAの公式サイトまたはCQ出版のサイトに掲載されたものをご参照ください.すでに決まっている概要を次に示します.「30分間の周回数(走行距離)」を競うレースという点では秋田のレースとほぼ同じですが,異なるところがいくつかあります.
(1) 車体の改造は認めない.
(2) カウルを付けることは認めない.
(3) タイヤは市販されている16インチのものに限定する(チューブは自由).
(4) モータは「CQブラシレス・モータ&インバータ・キット」の"モータ本体"に限定する(コイルの巻き線・巻き方は自由).
(5) モータ制御装置は自由とする(「CQブラシレス・モータ&インバータ・キット」のインバータ基板の改造,別コントローラもOKとする).
(6) 電池は鉛電池12V仕様2個でメーカは問わない(ただし重量制限がある).
(7) 電気二重層キャパシタの使用は認める(ただし事前充電は認めない).
(8) ドライバの下限体重(ヘルメット着用時)を65kgとする(不足時はオモリを積む).
(9) 予選は行わない.スタート・グリッドの位置は抽選で決定する.
(10) 勝敗は30分経過時でコースを何周したか(同じ周回数の場合は,直前の周回完了時のタイムで順位付けする)
●勝敗を左右するのは坂道対策?
このレースの主目的は,モータ制御技術/カート制御技術の設計・製作技術を競うことにあります.5月の秋田のレースと何が異なるかといえば.先に述べたようにコースに坂道があるということです.この課題をエレクトロニクス&マイコン制御でどのように解決するかを競うことになる,と予測しています.では,どのようなレースになるのかをもう少し詳しく予測してみましょう.
(1) 足回り
上位を目指すのならば,(カウルの装着が認められないので)空気抵抗の改善より転がり抵抗の低減化の工夫はすべきでしょう.通販等で転がり抵抗の少ないエコタイヤを探すとか,空気圧の高いタイヤ(チューブ)を選ぶとかの方法があるでしょう.もちろん,ホイール・アライメントの調整も重要です.ばかにしてはいけません.
(2) モータ仕様 ~坂道対策1
このレースでモータ・コイルの巻き方が重要であることは間違いありません.とくに今回のコースは坂が多く最大斜度4.2%,高低差12mということが気になります.坂道対策は考えなくてはいけません.高速性を狙いすぎて,コイルの巻き数を減らすと危険度は増します.
じつは弊社編集部ではこのコースを15分だけ借りて試走しました(写真2).モータ18コイルの1相分8コイルを"6直列"で巻いたカートと2直列3並列で巻いたカートの2台(ソフトはデフォルト状態)とも,無事2周回することができました.ただし,速度は大きく異なりました.いずれのモータも1コイル当たり16ターン以上の巻きをしています.
写真2 編集部が2台で試走したときの様子

(3) 電流制御 ~坂道対策2
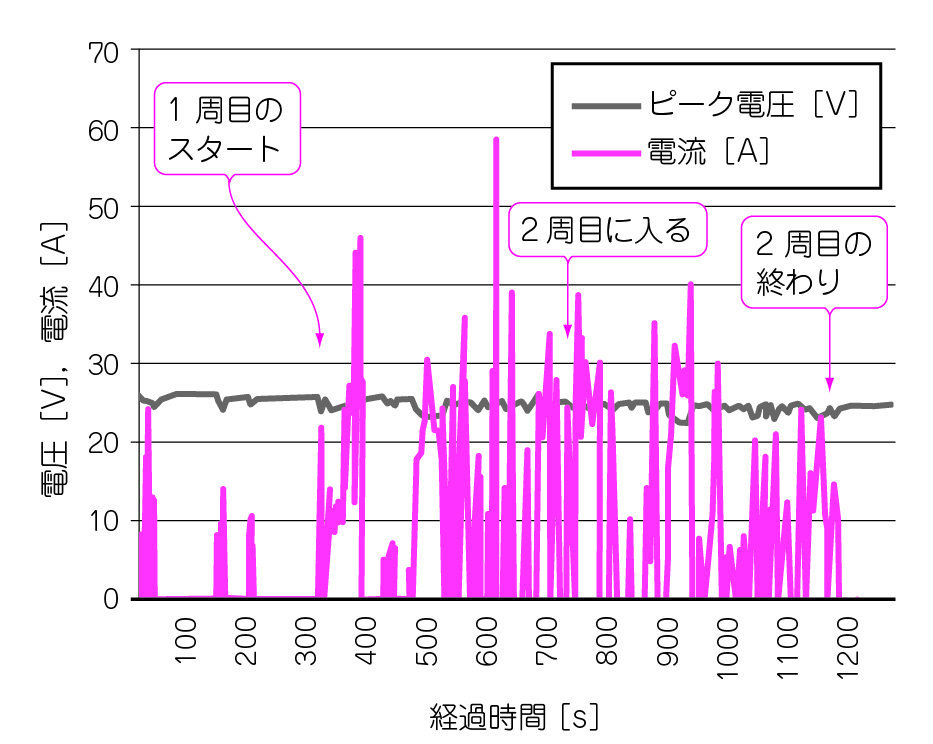
ここで重要なのは電流の制御です.試走時も,電流計を付け電流が流れすぎないようにアクセルを制御しながら運転しました.試走時の電圧値と電流値のグラフを図2に示します.この図を見ると意外なほど瞬発的に大きな電流が流れている個所がいくつもあります.坂道に入るところと,直線コースに入るところで,そういう現象が起こっています.それでも,あくまで瞬時であったためか,カートにある40Aのブレーカも落ちることも,モータのインバータ基板にある30Aのヒューズが飛ぶことも,MOSFETが焼けることもありませんでした.レースになると思わずアクセルを踏み込みたくなります.レース場でおそらく,電流制限の仕組みを組み込むのがいいと思います.その簡単な実現方法は,ソフトウェアで電流制限をする方法です.このインバータ回路は,デューティ比の変化でPWM(パルス幅変調)制御しているので,デューティ比を制限するという方法などがあります.
図2 袖ヶ浦コースを2周試走したときの電流・電圧値の変化
(4) 回生とキャパシタの使用 ~坂道対策3
電池ももちろん重要です.このレースでは,鉛電池2本の使用で,重量の制限があるだけで,その選定と充電方法は自由です.さらに,キャパシタ(電気二重層キャパシタ)の使用が認められます.キャパシタは内部抵抗が鉛電池よりかなり低いので,下り坂道等の回生(ブレーキ相応時)時に大きく効果を発揮するはずです.上位を狙うのであればキャパシタにチャレンジするの価値はあるのではないでしょうか.登り坂では,かなり電気を使いますので,下り道で電気を貯めることができれば,航続距離を十分延ばせられるのかもしれません.
・
というように,今回のレースは,秋田のレースのときよりも,エレクトロニクス&マイコン制御系の技術ノウハウが重要になると思います.しかし,このレースもクルマのレースです.モータの制御技術だけではダメで,コースをきちんと効率よく走るクルマが優勝するのではないでしょうか.


