音声信号処理の基礎理論(後編) ―― 線形フィルタ,適応アルゴリズム,周波数領域の処理
tag: 組み込み ディジタル・デザイン
技術解説 2010年9月17日
3.適応アルゴリズム
LTIフィルタとは異なり,与えられた手順に従って,フィルタ係数を更新し,自動的に所望の特性を実現するフィルタがあれば便利です.このようなフィルタを適応フィルタと呼びます.また,係数更新の手順を適応アルゴリズムと呼びます.
適応アルゴリズムは多くの場合,フィルタ出力と所望の信号との2乗平均誤差が最小となるように設計されます.所望の信号をd(n),フィルタ出力をy(n),それらの差をe(n)としたとき,2乗平均誤差を評価関数Jとして次式で定義します.
 .....(24)
.....(24)
適応フィルタを図27のようにFIRフィルタで構成するものとします.
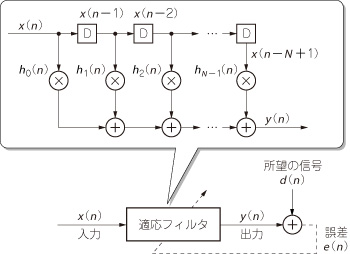
図27 適応フィルタの構成
FIRフィルタで構成した例を示す.
このとき適応フィルタの出力は次式で与えらます.
 .....(25)
.....(25)
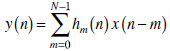
式(25)を式(24)に代入すれば,評価関数Jは,各フィルタ係数の2次関数となることが分かります.
これを視覚的に確認するため,次数N=2のときの評価関数Jのイメージを図28(a)に示します.
評価関数Jを最小化するためには,Jを各フィルタ係数で偏微分し,その関数の傾きと逆符号の方向にhmを更新します.この様子を図28(b)と図28(c)に示します.
図28 評価関数と係数更新
評価関数Jを最小化するためには,Jを各フィルタ係数で偏微分し,その関数の傾きと逆符号の方向にhmを更新する.
さて,フィルタ係数を「定数」と考えて,実際にJを偏微分すると,
![]() .....(26)
.....(26)
という簡単な式が得られます.これがフィルタ係数hmに対するJの傾きですから,式(26)と逆符号の向きにフィルタ係数を更新します.更新の大きさを決める正の量μ/2を導入して,hm(n)に関する適応アルゴリズムを書くと,
![]() .....(27)
.....(27)
が得られます.ここで,μはステップ・サイズと呼ばれます.
式(27)は最急降下法と呼ばれる適応アルゴリズムです.ただし,μの値が大きすぎると係数が発散するので,その設定には注意が必要です.また,実際には期待値は計算できないことにも注意します.そこで実際の応用では,更新項を瞬時値としたLMSアルゴリズムがよく用いられます(図29).
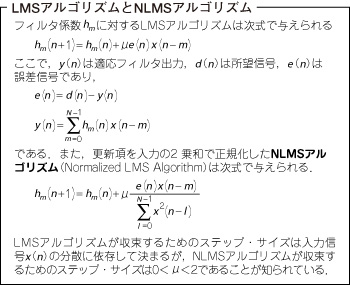
図29 LMSアルゴリズムとNLMSアルゴリズム


