新人研修にプロジェクト型ロボコンを導入 ―― モチベーションを上げながら即戦力を育てるエンジニア教育
●同じ部材とは思えないバリエーションに感心
1班が開発したロボット「VacaToroウッシッシー」は,頭を振りながら鼻面でボールを押し返す牛型ロボットである(写真3).ボールを探す「探索モード」,見つけたボールに向かって突き進む「突進モード」,壁にぶつかった場合やコート中央の黒線を踏んだ場合に後退する「修正モード」の三つを持ち,ボールを見つけては押し返す,という単純動作を繰り返す(写真4).ハードウェアを組み立て,ソフトウェアを実装してテストしてみると思ったように動かない点が多々あり,機構の改善とソフトウェアの修正を行ったという.

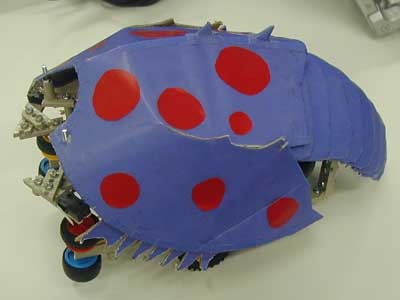
[写真3] 1班のロボット「VacaToroウッシッシー」
外装はペットボトルを利用して作成した.
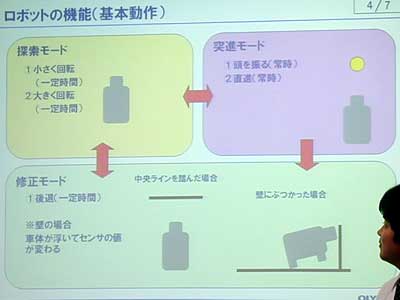
[写真4] 1班によるロボットの機能説明図
なお,ボールを押し返す方向については特にねらっていない.
2班が開発したロボット「くるくるん」は,甲羅を持つロボットである(写真5).ボールを発見したら車輪でボールを巻き込んで捕獲し,1回転しながら奥行きの深い方向を探してボールを発射する(写真6).ボールの巻き込みと発射に用いているモータの負荷が高く,すぐにモータが壊れてしまったため,回転速度を段階的に変化させるなどの改善を行った.また,機構が複雑であるため,設計段階で試作機を作り,ボールの捕獲と発射を実現できることを確認した.その後,ハードウェアの組み立てとソフトウェアの実装作業を並行して行った.
[写真5] 2班のロボット「くるくるん」
外装はダンボールを使用して作成した.
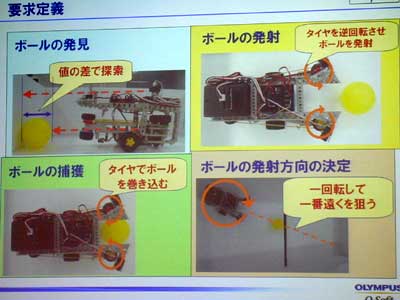
[写真6] 2班による要求定義
3班が開発したロボット「MASEYAN」は,阪神タイガース・カラーの猫型ロボットである(写真7).ボールを発見したらカプセルをかぶせて捕獲する.コート中央の黒線を検知したら,カプセルを回転させてボールを相手コートに返す(写真8).どの班も,ボールを発見するのに二つのPSDセンサの値の差を用いているが,3班は捕獲にカプセルを使うので,ボールの位置をできるだけ正確に認識できるように計算式を工夫したという.また,ソフトウェア実装後に91項目についてテストを行い,現れた問題点を一つ一つ解決した.

[写真7] 3班のロボット「MASEYAN」
カプセルにかぶせてある黄色の外装は,対戦相手と衝突したときに機体を守るためのものだという.
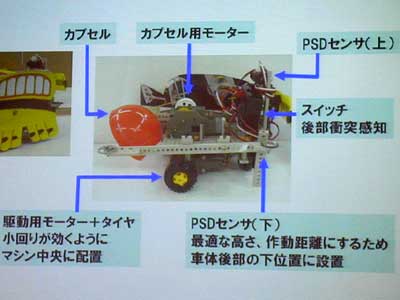
[写真8] 3班によるハードウェア構造の説明
●思わぬ番狂わせに会場が沸く
競技会は,三つの班の総当たり方式で行われた.練習試合ではなかなか活躍できなかったという1班「VacaToroウッシッシー」が大健闘する一方で,2班「くるくるん」はせっかく捕獲したボールを何度も自コートに向かって発射してしまい,なかなか得点につながらなかった.3班「MASEYAN」は,捕獲したボールを確実に相手コートに返していた.結果は,1班 vs. 2班が3対1,1班 vs. 3班が1対2,2班 vs. 3班が1対1となり,3班が優勝した.
優勝した3班に聞いたところ,ハードウェア,ソフトウェアのどちらについても詳しい人材がチーム内にいなかったため,できるだけ単純なつくりにしたのが良かったのではないかと分析していた.2班は,ボールを自コートに向かって発射してしまうことがあるという問題を事前に認識しており,この問題を回避した別バージョンのソフトウェアも開発していたが,そちらのバージョンだと別の個所でうまく動かないところがあり,しかたなく現バージョンのままで本番に臨んだという.1班は,開発当初から「愛着の湧くロボットを作ろう」と考えていたという.そのねらいは見事に当たり,目を光らせてボールに突進するロボットの姿が人気を博していた.


