マネキンからお好み焼きまで,人間社会に溶け込むロボットが集合 ―― 国際次世代ロボットフェア2008
●交通標識を認識して安全運転を支援
中部大学 工学部 情報工学科 藤吉弘亘研究室は,自動車に搭載したカメラ映像から交通道路標識や歩行者を自動識別し,車両前方の状況をドライバに知らせることで安全運転を支援する「自動車の目の機能」のデモンストレーションを行った(写真5).本機能を搭載した鉄道模型が走行しながら交通道路標識を認識し,その標識通りに減速や停止などを行ってみせた.なお,この研究は,デンソーと中部大学の共同研究であるという.

[写真5] 中部大学 工学部 情報工学科が展示した「自動車の目の機能」
標識を認識する手順は次のようになる.まず対象物の特徴点(拡大・縮小・隠れの影響を受けにくいもの)を抽出する.次に,特徴が似ている点同士の対応を取り,対応付けされた点から標識の中心の基準点を求める.最後にマッチングをとり,標識を認識している.
●話者の音声のみを抽出して認識
レイトロンは,マイク入力から自動抽出した話者の音声だけを認識する音声認識システム・モジュール「BSRM01-01E」を展示した(写真6).本製品は,雑音の多い環境においても高性能な音声区間検出を実現するという.そのほか,登録フレーズのみを抽出する機能(認識フィルタリング)や,並列処理によるリアルタイムの応答機能を持つ.話者の音声登録は不要.本システムは,同社が提供する音声認識コミュニケーション・ロボット「Chapit」にも搭載されている.
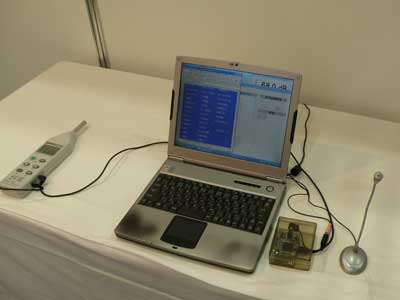
[写真6] レイトロンの「雑音ロバスト音声認識システム(BSRM01-01E)」
音声認識機能は,北海道大学 宮永研究室と共同研究した.音声認識は孤立単語認識方式(フレーズ認識方式)を採っている.事前に登録済みのフレーズの中から一つのフレーズを選んで音声入力すると,音声認識LSIがデータベース中のフレーズ群(学習データ)と比較して,最も近いフレーズに割り当てられたインデックスと,そのデータが生じる確率を算出する.ホストとの接続については,3種類(SPI,I2C,UART)のシリアル・インターフェースのいずれかを選択できる.
●ロボットを操作して景品を運び出す
メカトラックスは,2足歩行ロボットを使った業務用アミューズメント機器「ロボキャッチャー」のデモンストレーションを行った(写真7).一般にアミューズメント施設に設置されているクレーン・ゲーム機は,アームを操作して景品をつかむものが多いが,本機器は,クレーンの代わりに2足歩行ロボットを操作して景品をつかみ,投下口まで景品を運んで落とす.万が一故障などが発生した場合でも現場ですぐにパーツを交換できるように,ロボットの接続はコネクタ形式にしている.交換にかかる時間は30秒ですむという.

[写真7] メカトラックスの「ロボキャッチャー」
●無人ヘリコプタの自律制御技術から生まれた小型姿勢センサ
ヒロボーは,小型姿勢センサ「IMU-05」を展示した.本センサは,同社が長年取り組んできた無人ヘリコプタの自律制御技術から生まれたもので,姿勢角(ロール,ピッチ,ヨー),3軸の加速度,角速度,磁気方位などの情報を取得できる.移動体の加速度環境下でも姿勢計測が可能.防災や救助,安全監視分野における機器の姿勢変位の検出に活用できるという.本センサは,千葉大学 野波研究室と共同開発した.

[写真8] ヒロボーの「IMU-05」


