自作飛行ロボットで低速安定飛行を競う ―― 第3回 全日本学生室内飛行ロボットコンテスト
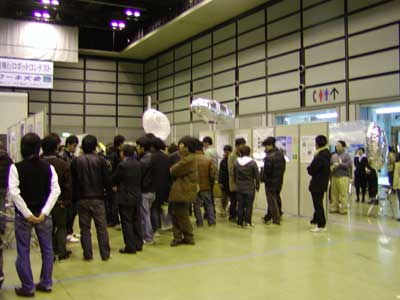
2008年3月21日~22日,東京都大田区産業プラザ(東京都大田区)にて,自作機体を用いたラジコン飛行機とラジコン飛行船の競技会「第3回 全日本学生室内飛行ロボットコンテスト」が開催された(写真1).高等専門学校や大学,大学院などの40の学生チームが参加し,機体製作と操縦の腕を競った.主催は日本航空宇宙学会.
[写真1] 第3回 全日本学生室内飛行ロボットコンテスト
東京都大田区産業プラザ(東京都大田区)にて開催された.2日間かけて,機体審査や飛行練習,飛行競技,ポスタ・プレゼンテーションが行われた.写真はポスタ・プレゼンテーションの様子.
競技内容は,機体に取り付けたカメラで「観測フィールド」と呼ばれるエリアに置かれた複数の文字板の文字をなるべく多く読み取り,制限時間内にスタート地点まで戻ってくるというもの.画像を捉えて無線で送信するカメラは市販のもの(アールエフの超小型カメラ「RC-12」)を用いるので,映像の送受信部分を各チームで開発する必要はない.また,操縦に用いる送信機と受信機も市販のものを用いる.ただし,送信するデータを工夫したり,受信したPWM(Pulse Width Modulation)データをどのように制御に用いるかを工夫することは可能.安全面や飛行スペースの観点から,ラジコン飛行機は重さ150g以下,ラジコン飛行船は長さ1.5m以下と決められている.
同競技会は,チームによる実践的なもの作り経験を体得できる場として企画されている.
● 制御の工夫が目立つ飛行船ロボット
筑波大学 理工学群 工学システム学類 3年生の引頭 一樹氏,関口 裕也氏,森田 華子氏,イアノフ・アレクサンデル・イゴレビッチ氏,ゴデウィタラナ ムディダ チャンピカ氏は,機体の下部に光位置センサ(PSD:position sensitive detector)を取り付け,高度をあらかじめ設定した値で一定に保つように制御するラジコン飛行船「Kiroff」を開発した(写真2).競技時には安定した飛行で正確に文字を読み取り,飛行船部門で1位となった(飛行1回目は正答16,誤答0.飛行2回目は正答19,誤答0).

[写真2] Kiroffの飛行の様子
動画その1(MOVファイル,3.15Mバイト),動画その2(MOVファイル,1.54Mバイト)を参照.
飛行船部門で2位となった防衛大学校 理工学研究科 航空宇宙工学科 2年生の長谷 くる実氏,宮田 憲光氏,石井 佑佳氏,宮崎 嵩大氏,石田 貴弘氏は,ラジコン飛行船「くるみ号」を開発した(写真3).四つのバルーンで浮力を確保し,間にシート状のバルーンを入れて左右のバランスを随時調整していた.

[写真3] くるみ号
飛行1回目は正答17,誤答2.飛行2回目は正答18,誤答2.
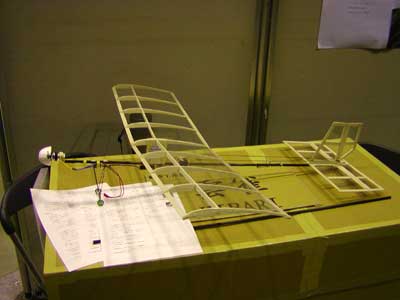
防衛大学校 理工学研究科 航空宇宙工学科 修士1年生の坂井田 博俊氏,橋本 慎一氏,浦川 克也氏は,ラジコン飛行船「leap」を開発した(写真4).この飛行船は,コントローラでより直感的に操作できるように工夫されている.例えば,右旋回する場合はコントローラのレバーを右に倒すが,中立に戻すとそれ以上旋回しないように制御している.高度を自動で一定に保つ機能も備えている.保つべき高度は上下レバーで随時指定できる.加えて,ヘッド・マウント・ディスプレイを装着した操縦者が首を振ることにより,飛行船に搭載したカメラの向きを操作できる.飛行船に搭載したカメラの映像はヘッド・マウント・ディスプレイにも映るようになっており,操縦者はごく自然な感覚で文字板を見渡すことができるという(写真5).

[写真4] leap
さまざまな機能を盛り込んだ結果,搭載機器(エンベロープ)が重くなってしまった.そのため,バルーン部分は制限サイズ内でなるべく容量を得られるような形にしたそうだ.

[写真5] leapを操縦しているところ
操縦者の安全を確保するため,ゴーグルの使用が義務づけられている.ヘッド・マウント・ディスプレイはこのチーム独自.
● バラエティに富んだ機体の飛行機ロボット
飛行機部門においては,機体の形状や材質に工夫をこらしたチームが目立った.床面に置かれた文字を読み取る競技であるため,ラジコン飛行機にとっては,ゆっくりと飛行できることが重要になる.そのため各チームは,バルサ材や和紙,食品用ラップ・フィルムなど,思い思いの素材で機体を組み上げていた(写真6~写真9).
[写真6] 雲雀
都立航空高等専門学校 機械工学科 2年生の平英亨氏,石鍋 治己氏,青木 将氏,元田 渓介氏は,ラジコン飛行機「雲雀」を開発した.重心位置と左右のバランスに特に気をつけて設計したという.飛行練習時には安定してきれいに飛んでいた.

[写真7] 推進丸
東京大学 航空宇宙工学科 3年生の増田 紘俊氏,今枝 宗矩氏,古澤 照宜氏は,翼を4段重ねにしたラジコン飛行機「推進丸」を開発した.コンパクトな機体で必要な揚力を得るために複葉機にしたという.飛行練習時には重心を取るのが難しそうに見えたが,本番競技の飛行1回目には見事にスタート地点まで帰還し,正答2,誤答1で12位となった(飛行2回目は,残念ながら失格).

[写真8] RENIUS
神奈川工科大学 航空研究部 3年生の塩原 章利氏,田村 敏氏,岩渕 文弥氏,品田 祐氏,本田 康太郎氏は,衝撃吸収材であるEPP(発砲ポリプロピレン)を機体の要所要所に用いたラジコン飛行機「RENIUS」を開発した.EPPは発泡スチロールに似ているが,弾力があり,衝突時などに壊れにくい.飛行1回目は5位(正答12,誤答1),2回目は8位(正答14,誤答1).
[写真9] Booing707 Joyfull
中日本航空専門学校 航空生産科 2年生の岡田 慎之介氏,小川原陽出氏,塚原 大地氏,星野 雄大氏,水越 広樹氏は,ラジコン飛行機「Booing707 Joyfull」を開発した.機体はすべて木製だという.ゆっくりと飛行し,横滑りするような形で旋回する独特な動きが目立っていた.飛行1回目(正答18,誤答0),2回目(正答18,誤答0)とも2位.
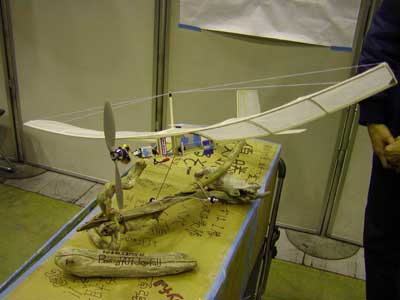
飛行機部門で1位となったのは,秋田工業高等専門学校 専攻科 生産システム工学専攻 1年生の神馬 義貴氏と湯川 啓介氏が開発したラジコン飛行機「Mayfly」.機体の重さは94gで,ふわふわと紙が漂うように飛行していた(写真10).飛行1回目は正答19,誤答0で,2回目は正答18,誤答0となった.

[写真10] Mayflyの飛行の様子
翼のアスペクト比(縦横比)は0.97.同チームの研究室の風洞実験の結果によると,アスペクト比が下がるにつれて最大揚力係数が大きくなるのだという.
ラジコン飛行機の中にも,電子制御に工夫を凝らしたチームがある.福岡工業大学モノづくりセンター飛行ロボコンプロジェクト 2年生の椋木 英貴氏,佐藤 直樹氏,岡永怜氏は,ラジコン飛行機「Automatic plane」に加速度センサを搭載してコントローラから送信されたPWM値を補正し,仰角を一定に保つよう工夫していた.そのため速度を抑えてゆっくりと飛行しやすくなったという.飛行1回目は6位(正答13,誤答2),2回目は11位(正答10,誤答2)となった.
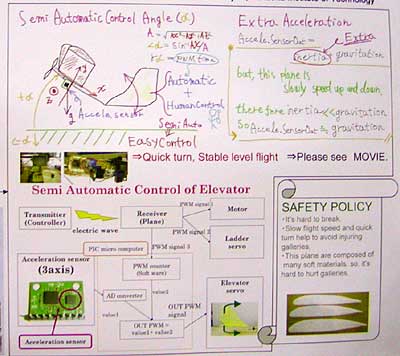
[写真11] Automatic planeの説明図


