派手なアピールの陰に地道な積み重ねあり ―― チーム「うしろむき98%」に聞くロボコン勝利の極意
ETロボコン2007 関西地区予選会(タイム部門)で優勝したチーム「うしろむき98%」は,コースのショートカットやZクランク走破などでポイントを稼ぎ,注目を集めた(詳細はこちらを参照).
派手なパフォーマンスを支えている正確な制御は,いったいどのように実現されているのだろうか.チームの開発メンバに聞いた.

[写真1] チーム「うしろむき98%」のロボット
光センサの遮光スカートは「こだわりの七角形」だという.
――チーム・メンバは何名ですか?
うしろむき98%:開発メンバは,私1人です.あとはビデオ撮影などを担当してくれたメンバが1人います.
――チーム名の由来を教えてください.
うしろむき98%:最初に,どういう風に走ったら面白いだろう? と考えました.「コースを全部後ろ向きに走ったチームはロボコン史上いないだろう」と思ったので,やってみることにしました.ただしZクランクなどの一部分は前向きのほうがいいだろうから,後ろ向きはだいたい98%くらいかな,と.実際,アウト・コース注1については,後ろ向きのままで周回させることもできました.
でも,1周走るのに4分もかかるんです(笑)注2.後ろ向きに走っていますから,車体の前の方に付いている光センサで白黒の変化を検出したときには,後輪は大幅にコースから外れてしまっていて,無駄な動きが多いんです.はじめは後ろ向き走行でリタイアでも笑いを取れればいいかな,と思っていました.でも,そうすると予選落ちで全国大会に出られない.そこで,ドルフィン・ジャンプとZクランクを最短距離で走る,今のルートに切り替えました.
注1;コース上には,インとアウトの2本のトレース・ラインがある. 注2;ETロボコンでは,2周で120秒を過ぎるとリタイア扱いとなってしまう.
――あのルートで完走できる成功確率はどれくらいですか?
うしろむき98%:実は,大会の3~4週間前から,あのルートでほとんど失敗していないんです.後は,ロボットの動きをよく観察して,より良い制御ができるようにコードをチューニングする作業を,ひたすら繰り返しました.
ただ,動的なキャリブレーションは行っていないので,外光が差し込んだり試走時と光の状況が変わるような環境では,走れないかもしれません.
――完走を確実にした上でのチューニングに3週間とは,すごいですね.
うしろむき98%:チューニングにあたっては,ロボットの動きやプログラムを確認するのに,もう1人のメンバがハイビジョン・カメラで録ってくれた映像が役に立ちました.特に,スーパー・スロー・モードとか....何か挙動がおかしいな,と感じたとき,スーパー・スロー・モードの映像を観ると,肉眼では確認できないステアリングの動きまで確認できるんです.
また,うちのチームの秘密兵器「光デバイス」も活躍してくれました(写真2).2色のLEDを光らせることで,アルゴリズムの変わり目などを視覚的にチェックできます.ちなみに,これはチーム・メンバの手作りです.
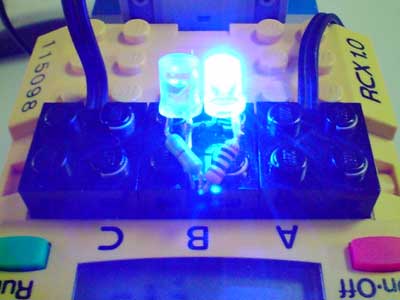
[写真2] 秘密兵器「光デバイス」 (画像にマウスを合わせてみてください)
2色のLEDを光らせることで,アルゴリズムの変わり目などを視覚的にチェックできる.「音を鳴らすよりも分かりやすい」とのこと.
――確実な制御の秘けつは何でしょう?
うしろむき98%:ずばり"一時停止"です.何かをしながらほかの何かをしようとすると,制御はとたんに不確実になります.今年のうちのチームのテーマは「確実に走る」でしたから,動作を一つ一つこなしては止まり,また次の動作へ,というのを繰り返しました.
白地に描かれた黒いラインをトレースするときは,黒のラインのへりのほうに,「この値を追っていれば絶対確実に走れる」というしきい値の領域があるんです.私たちがモデルで「絶対領域」と書いた,あれのことです(写真3).トレースするときはつねにその値をなぞるように実装しました.
また,「白 vs 灰」よりも,「白 vs 黒」で見分けたほうが絶対領域が広くなるので,走行コースをいくつかの区間に分けて,灰色を検知しなくてすむところは「白 vs 黒」の絶対領域をトレースしました.Zクランクのあたりは,すべてタイマで制御しています.
もう一つポイントがあります.一時停止するたびに,ステアリングの位置を正面に戻しているんです.その際にも,絶対領域の値を利用しています.そうして,狙った角度にしっかりステアリングを向けて,次の動作に移っています.

[写真3] うしろむき98%が予選会に提出したモデル(一部)
――このような制御は,なかなかできませんよね.
うしろむき98%:いえ,あの走りは,やろうと思えばできるチームはたくさんあると思いますよ.
でも,思いついたからといって本当にそれをやろうとするかどうか? だと思います.また,「勝とう」ではなく「とことん楽しもう」と思ったのは,うちのチームが一番だったと思っています.
――予選が終わった後,本選注3に向けて何をしていますか?
うしろむき98%:まず,モデルを書き直しています.それからプログラムについては,本選ではアウト・コースでも面白い走りをするように改造中ですので,どうぞご期待ください.
注3;本選は,2007年7月14日~15日に,東京都江東区のディファ有明(14日,競技会)と墨田区の墨田リバーサイドホール(15日,ワークショップ)にて開催される.入場は無料.
――このETロボコンでの経験は,仕事にも役立つと思いますか?
うしろむき98%:はい.仕事では,斬新なアイデアを思いついても「そんなの無理だ」と言われてしまうことがあります.でも,「無理そうに見えても,やればできるんだ!」と説得する材料の一つになるのではないかと.
もちろん,仕事は1人でどうこうできるものではないので,みんなを巻き込んで,チームとして,既成の固定観念を変えていきたいと思っています.
関連リンク
・レポート:奇抜な走りで問題提起? ぶっちぎりの走行タイムの理由とは


