「ロボット」が小中高生と組み込み技術をつなぐ ―― ET×ロボット2007
2007年6月9日~10日,大阪電気通信大学 四条畷キャンパス(大阪府四条畷市)にて,組み込み技術(ET:embedded technology)とロボットをテーマにしたイベント「ET×ロボット2007」が開催された(写真1).中高生に向けたサッカー・ロボット制作講座や,小学生以上を対象とした組み立て式の動物型ロボット工作教室などが開かれ,親子連れなどでにぎわった.
また,本イベントの一環として,LEGO MINDSTORMSによる小型自走ロボットの競技会「ETロボコン2007 関西地区予選会」が開催された(レポート記事「奇抜な走りで問題提起? ぶっちぎりの走行タイムの理由とは」を参照).

[写真1] ET×ロボット2007の会場
大阪電気通信大学 四条畷キャンパス(大阪府四条畷市)にて開催された.
●サッカー・ロボットを作ってロボカップ・ジュニアに参戦
ロボカップ・ジュニア大阪ノード実行委員会と大阪府立淀川工科高等学校は,中学生と高校生を対象とした,2日間にわたるサッカー・ロボット製作講座を開催した(写真2).ダイセン電子工業の自律型ロボット製作キット「Top Junior 3」を利用して,ロボットの組み立てとプログラミング,競技を行った.

[写真2] 競技の様子
赤外線を発するボールを追いかけ,相手のゴールにシュートして得点を競う.
ロボカップとは,自律型ロボットによるサッカーを題材とした国際プロジェクトである.サッカーやレスキューなどの競技会を開催しながらロボットの研究・開発を進めている.ロボカップ・ジュニアはロボカップのジュニア部門にあたる(詳しくはロボカップ日本委員会 公式ホームページを参照).
また,大阪電気通信大学 メディアコンピュータシステム学科は,ロボカップの小型ロボットリーグを実演してみせた(写真3).小型ロボットリーグは,5台のロボットが1チームとなってサッカー競技を行う.競技エリア全体の映像をカメラでとらえ,その情報に基づいてサーバが各ロボットに動きを指示する.本会場では,ゲーム・コントローラでロボットを操作できるように設定されており,子どもたちはロボットの操縦を楽しんでいた.

[写真3] ロボカップの小型ロボットリーグの実演
ロボットの上部に貼ってある色紙のパターンによって個体を識別する.中央の色がチームを表している.

[写真4] 大阪電気通信大学 メディアコンピュータシステム学科のロボカップ参加チーム「ODENS」のロボット
ロボットの部品にはあまりこだわらず,ソフトウェア制御に力を入れているという.
●組み立て簡単,どうぶつロボ工作教室
でんでんタウン電子工作教室は,電池とモータで動く組み立て式ロボットの工作教室を開催した(写真5).テントウムシ,犬,昆虫という難易度が異なる3種類のキットの中から一つを選択して製作した.会場前の廊下では,作ったばかりのロボットでさっそく遊ぶ子どもたちの姿が見られた(写真6).

[写真5] どうぶつロボ工作教室
熱心に説明を聞く参加者たち.

[写真6] 製作したどうぶつロボ
写真左が昆虫ロボット,写真右が犬型ロボット.
●ディジタル時計の制作を通して組み込み技術の一端に触れる
大阪電気通信大学 メディアコンピュータシステム学科は,組み込み技術の体験教室として,CPUボードを使ったディジタル時計製作講座を開いた(写真8).プログラミング経験のない参加者に対して,タイマ割り込みについて説明したり,ソース・コードの意味を1行ずつ説明しながら,プログラムを入力させていた.

[写真7] 教材として用いられた開発ボード
タイマ割り込みを利用して,時,分,秒をカウントアップする.
●牛乳パックで作った傾きセンサを使って自律飛行に挑戦
会場の一つであるKOZUKI HALLでは,ロボットなどの組み込みシステムを各社が展示した.三菱電機メカトロニクスソフトウエアは,手作りの傾きセンサを搭載した自律飛行ヘリコプター型ロボットの試作機を展示した(写真8).
本ロボットを開発している同社の岩橋正実氏は,組み込みシステム開発に適したオブジェクト指向の手法として,各オブジェクトが自律的に振る舞う「自律オブジェクト指向」を提唱している.同氏はこのモデルの効果を実証するために,四つのプロペラを備えたヘリコプター型ロボットを自作した.ジャイロ・センサは高価であるため,教材としての入手の容易性を考慮して,二つのフォトインタラプタと牛乳パックを組み合わせて,傾きを検知するセンサを作った.目下の悩みは,手作りのセンサの挙動が安定しないことだという.

[写真8] 自律飛行するヘリコプター型ロボット
興味を持った人が自分で試せるように,高価な部品は使わない方向で開発を進めている.
●"かわいさ"でアピール,Bluetooth制御の小型2足歩行ロボット
システクアカザワは,小型2足歩行ロボット「PLEN」を展示した(写真9).身長(高さ)は228mm,体重(重量)は696g,自由度数は18.Bluetooth通信機能を備えており,Bluetoothに対応したパソコンや携帯電話,Wiiリモコンなどから操作できる.価格は約25万円.Bluetooth通信機能や愛らしさが評価され,企業や教育機関などからの引き合いが多いという.
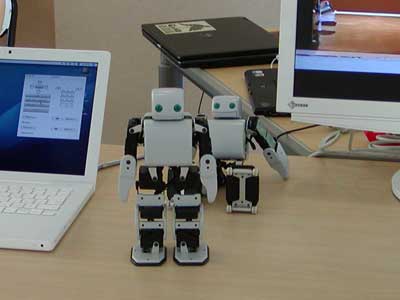
[写真9] 小型2足歩行ロボット「PLEN」
ローラースケーティングなどの,20種類以上のモーション(動き)が標準設定されている.
※PLENがローラースケートをしている動画はこちら(MOVファイル,1.87Mバイト)
関連リンク
・レポート:奇抜な走りで問題提起? ぶっちぎりの走行タイムの理由とは


