チーム「O.R.C.(オリンパスソフトウェアテクノロジー)」とチーム「ムンムン(NECソフトウェア北陸)」が優勝 ――ETロボコン2006
2006年7月1日~2日,東京都立産業技術高等専門学校(東京都品川区)にて,LEGO MINDSTORMSで作成したロボットの走行タイムとUML(unified modeling language)などのモデルの良し悪しを競う競技会「ETロボコン2006」が開催された(写真1).この競技会は今年で5回目となるが,例年,走行タイムで好成績を上げるチームとモデルが高く評価されるチームが異なっている.性能の良し悪しとモデリングの良し悪しが一致しないという問題があった.そこで今年は,アルゴリズムや制御方針の妥当性を評価する「予測性能」という項目をモデルの審査基準として追加した.これにより,走行タイムとモデル評価の間の相関が強まると期待されていたが,会場の照明や光の散乱に問題があり,コースを見失うロボットが続出した.
そのような中,当日の競技会直前の試走で適切なチューニングを行ったチーム「O.R.C.(オリンパスソフトウェアテクノロジー)」がコースをスムーズに走りきり,競技部門で優勝した.モデル部門では,チーム「ムンムン(NECソフトウェア北陸)」が,高速に走りきるための策をモデルにわかりやすく表現して,最優秀モデルに選ばれた.

[写真1] ETロボコン2006の競技会のようす
東京都立産業技術高等専門学校(東京都品川区)にて開催された.参加者約450名と一般見学者約150名が詰めかけて,競技を見守った
●競技部門:勝利のかぎはパラメータを考慮した設計
今回は108チームが参加したため,会場内にコースを2セット設置し,並行して競技を行った.会場の天井が高く,通常の照明だけでは暗かったため,スポット・ライトを併用しての開催となった.ロボットは光センサを用いて白地に描かれた黒線(または灰色線)のコースを検出するが,スポット・ライトを併用したことにより,明るさを判定するしきい値がコース上の位置によって異なるという,ライン・トレース・ロボットにとって過酷な環境となった.
これにより,走行中にコースを見失うロボットが続出した.競技では2セットあるコースをそれぞれ1回ずつ走行したが,2回とも完走できたのは108チームのうちわずか5チーム,1回だけ完走できたチームも21チームのみ,という結果に終わった.
競技部門で優勝したチーム「O.R.C.」によると,同チームは環境によって光センサから取得する値が大幅に変わることを開発段階から重要な課題と認識していたという.具体的には「設計変更のパラメータ化」を基本思想とし,ライン・トレース・ロボットの基本的な機能と,実機による動作確認をとおして特性を変える部分をあらかじめ明確に分けていた.試走や実験をとおしてパラメータ変更による調整を繰り返し,過酷な環境でも走れるようなロボットになっていたという.
当日は,競技会直前の試走会で,光センサによる認識が難しいとわかったため,例えば「直線コースは高速走行する」などのプログラムを削除し,単純に黒線をトレースするプログラムに切り替えた.また,スポット・ライトが当たって白っぽく認識される灰色のマーカ部分もコースとして検出できるようにしきい値を調整した.さらに,もっとも問題となる地点のスポット・ライトがやや斜めからコースを照らしていることを確認し,光センサの周りに取り付けた遮光スカートの角度をスポット・ライトに合わせて調整した.そして,コース面の状況を見て,コースに引っかからないように遮光スカートを折り込むなどの最終調整を行った.その結果,大半のチームがリタイヤしたコースをあっさりと走り抜けることができた(写真2).

[写真2] パルテノン・コースを完走したチーム「O.R.C.」のロボット
2セットあったコースの片方「パルテノン・コース」は,参加者らが"魔のパルテノン・コース"と呼ぶほど過酷な環境だった.コースの終盤にある,上り坂の開始を示す灰色のマーカ部分にちょうどスポット・ライトが当たっており,そこでコースを見失うロボットが続出した.108チームのうち,パルテノン・コースを完走できたのは8チームだけだった
●モデル部門:「速そうなモデル」が良いモデル
モデル部門では,昨年のETロボコン チャンピオンシップ大会(走行タイムを競う)で優勝したチーム「ムンムン(NECソフトウェア北陸)」が最優秀モデルとして選ばれた.今年から導入された審査基準「予測性能」と,オブジェクト指向モデルとしての良さがバランス良く備わっていたことが高評価につながった(写真3).
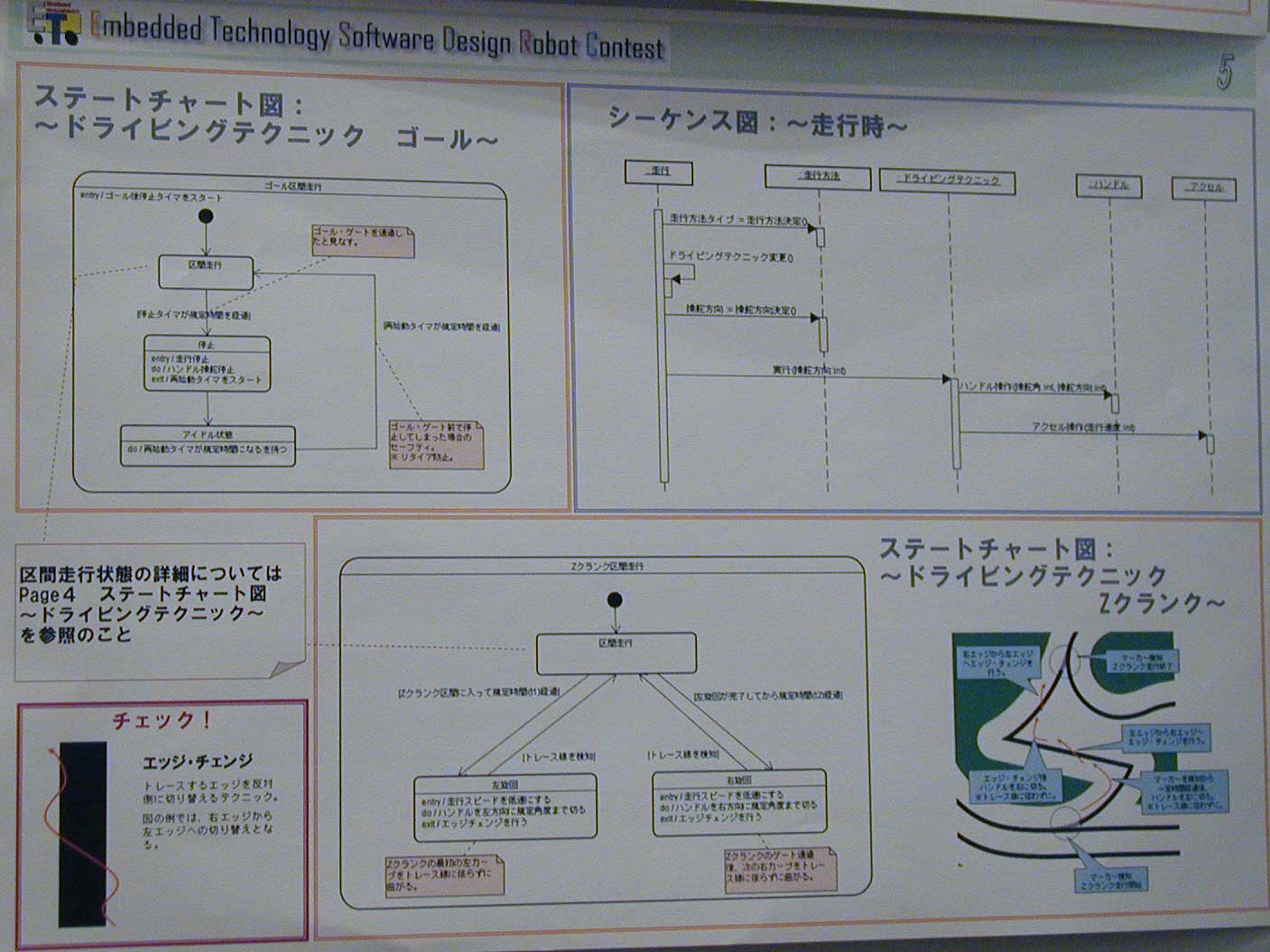
[写真3] チーム「ムンムン」のモデル(クリックすると拡大する)
UMLモデルと図解の両方で走行戦略を表現していた.競技部門においては,スタート直後でコースを見失うなどして,2回とも完走できなかった
昨年までの審査基準は,オブジェクト指向モデルとしての表現の正しさや見やすさ,モデルの妥当性などを評価していた.新しい審査基準の導入により,各チームが,勝つための方針やアルゴリズム,要素技術の妥当性を,図解や写真などを使ってモデルの中で提示するようになった.このため,モデルがわかりやすいものになった.「今までのモデルは"こんなことをやりたい"という宣言にすぎなかった.一方,今回のモデルは設計図になっていた」(ETロボコンの審査委員長を務めるオージス総研 渡辺博之氏).
今回の競技部門では,(あらかじめ想定された環境で)速く走れるロボットよりも,環境変化に適応できたロボットが勝利する結果になった.そこで審査委員会は,来年のモデル審査基準には「対環境性能」を取り込み,今度こそ「モデリングの良いロボットは性能も良い」という仮説を実証したいと考えている.
関連リンク
・レポート:本番まであと2週間,競技会の栄冠はだれの手に
・レポート:組み込み企業のUML教育に利用されるETロボコン
・ニュース:企業や学生によるロボット走行の競技会「ETロボコン2006」を7月1日~2日に都内で開催
・レポート:"ロボコン"開催で組み込み業界を目指す学生を増やす(ETロボコン2005 チャンピオンシップ大会)
・特別寄稿:組み込み技術者育成を目指す「ETロボコン」(ETロボコン選手権)
・レポート:40チームのUMLモデルとロボットが対決(第3回 UMLロボットコンテスト)
・レポート:UMLモデルと走行タイムを競うロボット・コンテスト開催(第2回 UMLロボットコンテスト)


