本番まであと2週間,競技会の栄冠はだれの手に ――ETロボコン 試走会
2006年7月1日に開催される「ETロボコン2006」の競技会を約2週間後に控えた6月中旬,本番と同じコースを使った試走会が開催された.参加した各チームは,開発した走行体を実際に走らせ,データ収集やプログラムの調整を繰り返した(写真1).
ETロボコンとは,LEGO MINDSTORMSで作成したロボットの走行タイムとUML(unified modeling language)などのモデルの良し悪しを競う競技会である.2006年の開催場所は東京都立工業高等専門学校(東京都品川区).7月1日(土)に競技会が,7月2日(日)にモデル審査ワークショップが開催される.見学は無料だが,事前登録が必要(事前登録のWebページはこちら).

[写真1] ETロボコン 試走会のようす
第1回目の試走会は6月上旬に開催されており,今回は第2回目にあたる
●ポイントは点線とZクランク
ETロボコンの競技トラックには,並行した二つのコース(インコースとアウトコース)があり,それぞれのコースを自律走行して2周した走行タイムの合計を競う.コースの内容は毎年変更されている.2006年のコースの特徴として,インコースに「Zクランク」,アウトコースに「点線ショートカット」が設けられている点が挙げられる(図1).どちらもコースから分岐する形で設けられており,メイン・コースを走行するのに比べて近道となっている.コースは白い下地(24ビットRGB値で#FFFFFF)の上に黒い線(#000000)として描かれているが,Zクランクと点線ショートカットの始点および終点は灰色の領域(#888888,以降グレー・ゾーン)となっている.
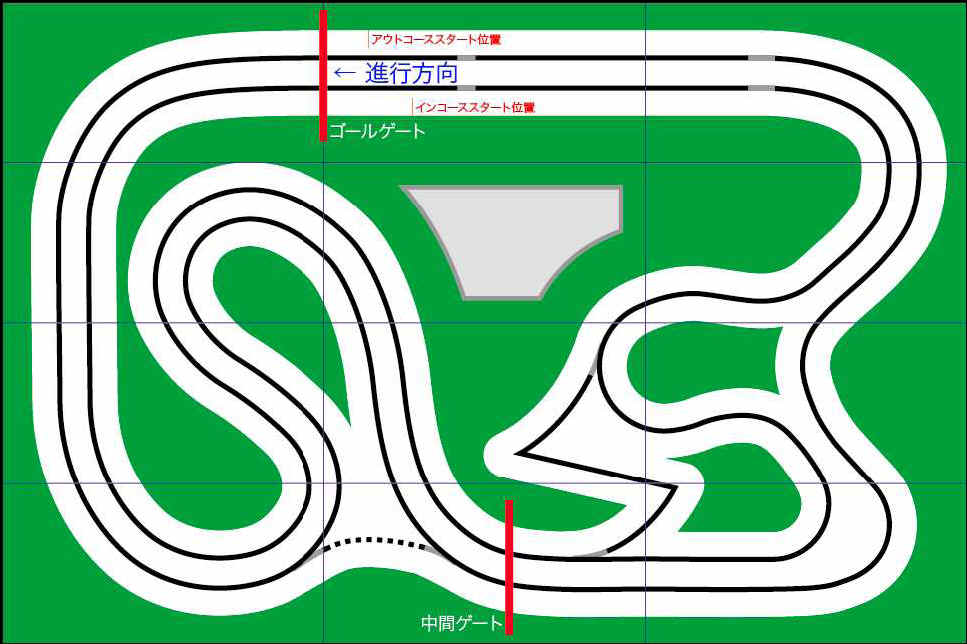
[図1] ETロボコン2006の競技トラック(クリックすると拡大する)
出典:ETソフトウェアデザインロボットコンテスト 競技規約 Ver.7.7(ETロボコン実行委員会 提供)
Zクランクは今年初めて導入された.これを通過したチームは,ボーナス・タイムとして走行タイムの合計から10秒減算される.点線ショートカットは2年前から導入されていたが,点線の間隔が30mmとなり,前年までの間隔(10mm)と比べて大幅に広がった.
そのほか,競技トラックの材質が今年から布(コースは印刷されたもの)になったことも,光センサから取得する値などに影響を与えている.前年までの競技トラック(白い発泡スチロール板に黒のビニール・テープを貼ったもの)のほうが光の乱反射などが多く,今年のほうが計測環境が改善されているという.
なお,コース上には「中間ゲート」と「ゴールゲート」が設けられており,この両方を規定の方向から通過すれば,周回したとみなされる.例えば,コースの湾曲した部分などをショートカットすることも可能(実際に,昨年のコンテストでは,チーム「KOO」が「ドルフィン・ジャンプ」と名付けたショートカット走法を走行体に組み込んでいた).ただし,コース外には芝生や丘,建物などの装飾が施される予定であり,かんたんにショートカットできるわけではない.
●それぞれの戦略を胸に,各チームが本番をめざす
Zクランクを制覇しようと意気込んでいるのが,チーム「サヌック(明電システムテクノロジー)」である(写真2).走行体が「Zクランク走行モード」に切り替われば,Zクランクを走り抜けられることを確認した.しかし,Zクランクの入り口(グレー・ゾーン)を正しく判定させる方法に頭を悩ませているという(写真3).

[写真2] チーム「サヌック(明電システムテクノロジー)」
静岡県沼津市からの参加

[写真3] グレー・ゾーン
グレー・ゾーンを正しく判定するのはなかなか難しい.LEGO MINDSTORMSの光センサは発光してその反射光の光量を測定するが,黒と白の境界部分でもグレー・ゾーンと同じ値になる場合がある
チーム「蕨レーシングチーム(沖通信システム)」もグレー・ゾーンの判定方法に悩んでいるという(写真4).同社は新入社員研修の一環としてETロボコンに参加している.本番には,社内の6チームのうち試走会でもっとも成績の良かった(完走した)1チームが出場する予定.

[写真4] チーム「蕨レーシングチーム(沖通信システム)」
走行体に貼ってあるシールは「ワラビー」.沖通信システムの本社がある「埼玉県蕨市」と掛けている
一方,点線ショートカットを丹念に試走させているのは,昨年のETロボコン チャンピオンシップ大会で優勝したチーム「ムンムン(NECソフトウェア北陸)」である(写真5).プログラムは「使えるものは流用している」とのこと.実は,同チームは昨年まで,グレー・ゾーンなどをまったく判定せず,とにかく走りきるという戦略をとっていた.今年の点線ショートカットやZクランクに同じ手は通用しないと同チームではみている.
[写真5] チーム「ムンムン(NECソフトウェア北陸)」
詳細は同チームが公開している参戦記「ムンムン不埒な参戦記」を参照
チーム「O.R.C(オリンパスシステムズ)」(写真6)は,青のビニール・テープで走行体をしっかりと巻いていた.チームは,宇津木(東京都八王子市)や初台(東京都渋谷区)など,同社の複数の拠点から募った有志で構成されている.青のビニール・テープは同社のロゴの色「オリンパス・ブルー」を示している.また,SFチックな外装の走行体も用意されていた.本番でどの走行体を使うかは未定だという.

[写真6] チーム「O.R.C.(オリンパスシステムズ)」
普段は医療機器やプロジェクタなどの組み込みソフトウェアを開発している.チーム名は,Olympus Robocon Clubの略
チーム「Teamふるかわ(アルプス電気)」(写真7)は,何回も走行させて記録を取っていた.走行速度や左右の首ふりの値を調整し,データを計測するのが今回の試走会での目的だという.同チームはスウェーデンTelelogic社のUMLモデリング・ツール「Rhapsody」を使用してMDD(モデル駆動開発)に基づいてソフトウェアを開発している.ソース・コードを1行も書かず,原則としてプログラムを自動生成しているという.

[写真7] チーム「Teamふるかわ(アルプス電気)」
宮城県大崎市からの参加
関連リンク
・レポート:組み込み企業のUML教育に利用されるETロボコン
・ニュース:企業や学生によるロボット走行の競技会「ETロボコン2006」を7月1日~2日に都内で開催
・レポート:"ロボコン"開催で組み込み業界を目指す学生を増やす(ETロボコン2005 チャンピオンシップ大会)
・特別寄稿:組み込み技術者育成を目指す「ETロボコン」(ETロボコン選手権)
・レポート:40チームのUMLモデルとロボットが対決(第3回 UMLロボットコンテスト)
・レポート:UMLモデルと走行タイムを競うロボット・コンテスト開催(第2回 UMLロボットコンテスト)


