6日間缶詰めでロボットの組み立て・制御を体験する ――大阪大学特別公開セミナ「作る! 動かす! 学ぶ! 最先端ロボット技術」
2004年3月22日~27日,大阪大学大学院工学研究科において,ヒューマノイド(人間型)ロボットを用いた公開セミナ「作る! 動かす! 学ぶ! 最先端ロボット技術」が開催された(写真1).参加者は,前半の2日間でロボットを部品から組み立て,後半の4日間でロボットを制御するアプリケーション・ソフトウェアを使いながら,ロボットの動きをプログラム(設定)する.ロボットというシステム全体,およびロボットに使われている要素技術(機械,制御,材料,人工知能)について議論し,それによって参加者自身が研究テーマや技術上の課題などを見出すことをねらいとしている.
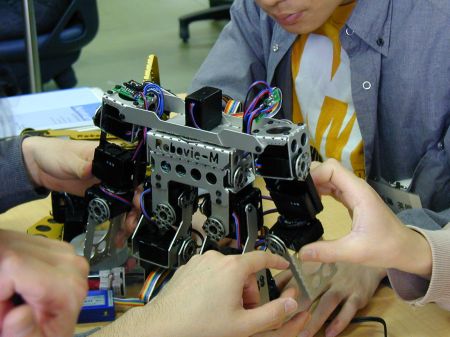
[写真1] 特別公開セミナ「作る! 動かす! 学ぶ! 最先端ロボット技術」
大阪大学 吹田キャンパス(大阪府吹田市)にて開催された.
教材として使われたロボットは,ATR(国際電気通信基礎技術研究所)が開発した「Robovie-M」である(写真2).ロボットの高さは29cm,重さは2kg程度.ロボットの関節にあたるモータを両腕に4個ずつ,両足に6個ずつ,腰と肩に1個ずつ備えている(合計22の自由度を持つ).モータの取り付け位置がくふうされており,寝返りをうったり,肩を使ってボールを1.5mほど先に投げたりできる.このほか,倒れた方向を知るための加速度センサ(2軸)を内蔵している.姿勢制御は行っていない.
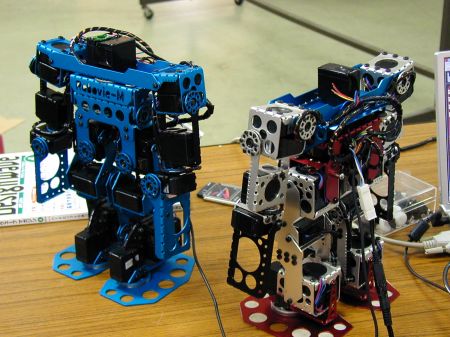
[写真2] Robovie-Mの外観
これは見本として大学側で組み立てたもの.ケーブルがきれいにまとめられている.セミナでは製作の手間を減らすため,肩などに基板を取り付けてフラット・ケーブルで接続した.
参加者は,アプリケーション・ソフトウェアを利用してモータの軸角度を設定する必要がある(写真3).ロボットの重心を崩さず,かつ手足を動かせない方向にぶつけないように設定しなければならない.
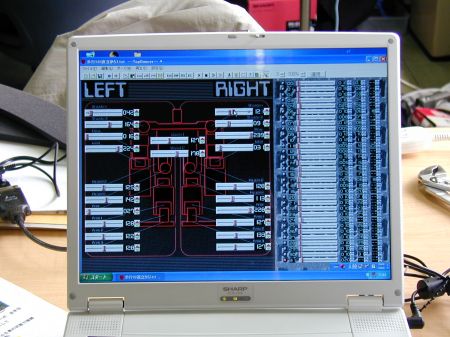
[写真3] 制御用のアプリケーション・ソフトウェア「TopDancer」
アニメーションのコマ送りの要領で,1コマごとに22個のモータの軸角度を設定する.画面の左側部分で軸角度を設定し,右側部分でそれぞれのコマから次のコマに切り替えるまでの時間を指定する.このようにして,一連の動作プログラムを作成したら,ロボットに搭載されているマイコンにRS-232-C経由でダウンロードし,実行させる.
セミナには,約25名の大学生や社会人が参加した.3~4人ずつのチームに分かれて作業を進めた.「ほふく前進させてみよう」,「物が置いてあるのに気づき,触ってみてびっくりする,という動きは?」,「完全防水仕様にすれば,泳げるのでは?」など,さまざまなアイデアが飛び出した(写真4).

[写真4] ロボットの動きを考える
下半身のモータのトルクは13kgだが,上半身のモータのトルクは4kgしかない.ほふく前進させようとしたが,腕の力だけでは体を動かせない.それでは,足も使ってみるか....
大阪大学大学院工学研究科 知能・機能創成工学専攻 助手の光永法明氏によると,大学の研究対象は非常に細分化されており,自分の研究している内容が何の役に立つのかわからず,モチベーションが上がらない学生も多いという.「ロボットを扱うことを通して,自分の研究している内容が何の役に立つのかを理解してほしい.また,そういうモチベーションの高い積極的な学生に,ぜひうちの工学研究科に来て研究してもらいたい」(光永氏).


