ロボット開発用のモジュール製品が続々登場 ――ROBODEX2003
2003年4月3日~6日,パシフィコ横浜(神奈川県横浜市)にて,人間との共存を目指したロボット技術の展示会「ROBODEX2003」が開催された.ロボットの動作のデモンストレーションを行ったほか,ロボット開発用の加速度センサ・モジュールやモータ制御用モジュールなどの展示が目立っていた.また,燃料電池を利用したロボットも登場した.
●ロボット用の加速度センサ・モジュールを6月に発売
ゼットエムピーは,2足歩行ロボット「PINO ver.2(写真1)」に搭載されているロボット開発用のモジュールを展示した.2003年6月に加速度センサ・モジュール(写真2(a))の発売を予定している.今後,メインCPUモジュール(写真2(b))やモータ制御用モジュール(写真2(c)),ギアード・モータなどを発売するという.また,加速度センサ・モジュールやモータ制御用モジュールには,共通のサブCPUモジュール(写真2(d))が利用されている.メインCPUモジュールのCPUと各モジュール(加速度センサ・モジュールやモータ制御用モジュールなど)のCPUを組み合わせることによって,各モジュールの分散制御を行える.

[写真1]PINO ver.2の外観
2003年4月より本ロボットの受注を開始した.販売価格は290万円を予定している.
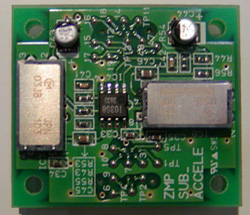
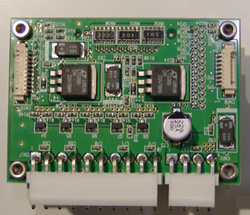
(a)加速度センサ・モジュール (b)メインCPUモジュール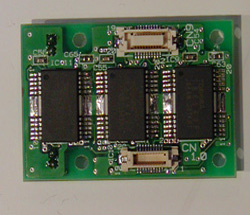
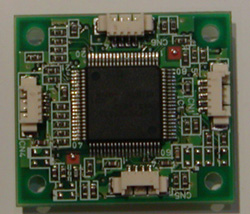
(c)モータ制御用モジュール (d)サブCPUモジュール
[写真2]PINO ver.2に搭載されているモジュール
2003年6月より加速度センサ・モジュールを発売する予定.このほかにも姿勢制御用の力センサ・モジュールなども用意している.
加速度センサ・モジュールは,センサ基板部とサブCPU基板部から構成される.センサ基板部は村田製作所の2軸ジャイロ・センサ「ENC-03J」や,米国Analog Devices社の2軸加速度センサ「ADX202E」などを搭載している.一方,サブCPU基板部は,日立製作所のマイコン「H8S/2612」やCANコネクタ,RS-232-Cコネクタなどを搭載している.
メインCPUモジュールは,日立製作所のマイコン「SH7055F」やCANコネクタ,RS-232-Cコネクタ,USBポートなども搭載します.また,外部メモリとして,64KバイトのSRAMと2Mバイトのフラッシュ・メモリを搭載している.モータ制御用モジュールは,モータ制御基板部とサブCPU基板部から構成される.モータ制御基板部は,東芝のモータ駆動用IC「TB6549F」などを搭載している.ギアード・モータは,遊星ギアとポテンショメータを内蔵している.本モータは,同社と日本電産コパルが共同開発したものである.
同社は,これらのモジュールの提供に合わせて,センサ制御用ソフトウェアやモータ制御用ソフトウェアなどの提供も検討しているという.
一方,三洋電機は,ロボットのモータやセンサを制御するためのモジュール「モーションコントローラ」を展示した(写真3の左).同社が展示したロボット「FLATTHAL」に搭載されている(写真3の右).


[写真3]モーションコントローラ(左)と,それを搭載したFLATTHALの外観(右)
本モジュールを利用することで,このロボットの試作期間を約半年間に抑えたという.ただし,画像認識などのソフトウェアの開発期間は除く.
本モジュールは,通信コントローラ部とモータ・コントローラ部,モータ・ドライバ部から構成される.通信コントローラ部は,日立製作所のマイコン「SH7729」が,モータ・コントローラ部には同マイコン「SH7047」を搭載している.また,1台のコントローラで四つのモータ(出力電力は最大250W)を制御することが可能であり,最大8台のコントローラをホスト・コントローラに接続できる.
本モジュールの電源電圧は20V~30V(DC),定格電流は最大30A(実効値)である.搭載されているRAMとROMのメモリ容量はいずれも8Mバイト. インターフェースとして,USBや汎用I/Oなどのポートを備えている.
このほか,東芝や富士通オートメーションなどもロボット制御用のボードを展示していた.
●WindowsとLinuxに対応したロボット開発用ソフトウェア
米国Evolution Robotics社は,ロボット開発用ソフトウェア「ERSP(Evolution Robotics Software Platform) 2.0」を展示した.本ソフトウェアには,視覚認識用の「Vision」,位置測定などを行うための「Navigation」,音声認識などを行うための「Interaction」,これらのソフトウェアとロボットのハードウェアを統合するための「Software Arcitecture」を用意している.OSはWindows 2000とWindows XP,Linuxに対応している.今回,これらのソフトウェアを利用したデモンストレーションが行われた(写真4).

[写真4]ESRP2.0を利用したデモンストレーション.
ロボットに搭載したカメラと携帯電話を利用したデモンストレーションが行われた.ロボットを操作したり,ロボットに搭載しているカメラの画像を見ることができる.また,障害物を回避しながら指定した位置へ到達することができる.
Navigationでは,同社の開発した解析技術「vSLAM(Visual Simultaneous Localization and Mapping)」が採用されている.vSLAMでは,ロボットが周囲の環境から自己の相対位置を計測するだけではなく,視覚情報も合わせて解析する.これにより,障害物の回避や,衝突や段差の察知を行える.
Interactionでは,あらかじめ認識させておいた音声ファイルと取り込んだ画像を対応させて,テキストを読み上げたりすることができる.例えば,絵本の一文を指し示した画像と,その画像に対応した音声のテキスト・ファイルを入力しておけば,絵本の一文を指し示した画像を認識して,その文章を読み上げる.
●燃料電池を利用したロボットが登場
総合警備保障は,燃料電池を搭載した警備用ロボット「XFCR-01」を展示した(写真5).これは,2002年4月から発売されている同社の警備用ロボット「ガードロボC4」に搭載されている鉛蓄電池を燃料電池に置き換えたものである.

[写真5]燃料電池を搭載したXFCR-01
将来的には,1週間の連続動作を目指すという.また,消費電力をガードロボC4と比べて1/3にした.
本燃料電池の発電方式は直接メタノール方式(DMFC)である.濃度5.8%のメタノールを5リットル使用したとき,40分間の連続動作が可能である.定格出力電力は240W.また,燃料タンクの場所を確保するため,同社の従来品と比べて制御部の大きさを1/5にした.走行速度は0.5m/sである.
一方,東芝は,補助用の電源として燃料電池(外付け)を搭載したロボット「ApriAlpha」を展示した(写真6).燃料電池の駆動方式は直接メタノール方式.この燃料電池は主電源のリチウム・イオン電池を充電するために利用する.リチウム・イオン電池のみの連続動作時間は約2時間だが,燃料電池を利用すると連続動作時間が約10時間なる.


[写真6]補助用の電源に燃料電池を搭載したApriAlphaの外観
本体部(左)の後部に接続して利用する(右).現在は,同社がノート・パソコン向けに開発した燃料電池を利用している.
本ロボットは音声認識機能を備えており,音声の聞こえる方向に動くことなどができる.移動速度は約0.5m/s.また,画像認識機能によって100人の顔を認識できる.
本ロボットには,CCDカメラや液晶ディスプレイ,六つの超音波センサ,二つのスピーカなどが搭載されている.また,IEEE802.11bやBluetoothなどの無線通信に対応している.


