救命救助をテーマにしたロボット競技会を神戸と東京で開催 ―― 第13回レスキューロボットコンテスト
●なるべく早く,ていねいに救助
競技そのものはシンプルである.実験フィールドのがれきの中に置かれたダミヤンを,レスキュー・ロボットを遠隔操縦して救出し,ロボット・ベースまで搬送する作業を制限時間(予選では8分,本選では12分)内に行う,というものだ(写真7).評価基準は,救出の完了,搬送の完了,個体識別の三つである.ただし,文字にすると簡単そうだが,実際の競技を見ると,高評価を得るのはなかなか難しいと感じた.
写真7 競技中のレスキュー・ロボット

筆者は,東京で開催された予選を取材した.予選では,各チーム2体のダミヤンを救出することになっている.1体はがれきの下に(写真8),もう1体は「特殊がれき」と呼ばれる,倒壊家屋を模したがれきの中に配置されている(写真9).ダミヤンに苦痛を与えてはならない.しかも,ダミヤンの持つ体力(フィジカル・ポイント)は時間経過と共に減っていく(写真10).まさに時間との戦いである.
写真8 柱状のがれきの下に置かれたダミヤン
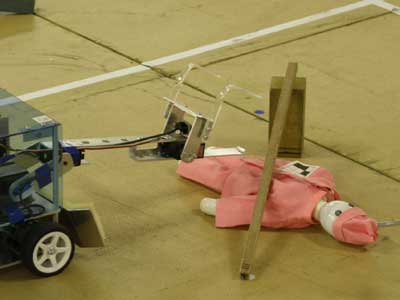
写真9 特殊がれきの中のダミヤン
倒壊した2階建て家屋の2階部分に要救助者がいる,という設定である.
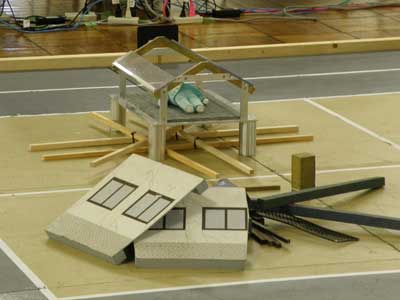
写真10 競技の進行状況
競技の進行状況は,リアルタイムでスクリーンに投影される.ダミヤンのフィジカル・ポイント(緑色で表示)は時間と共に減少し,苦痛(ダメージ,赤色で表示)が与えられるとさらに減る.

●実際の救助を見据えて
予選では,実験フィールドを直接目視しながらロボットを操縦してよいのだが,本選ではコントロール・ルームと呼ばれる隔離された部屋から,ロボットに搭載したカメラの映像を頼りに救助活動を行わなければならない(写真11).そのほか,ヘリコプターによる上空からの映像を模した「ヘリテレカメラ」というものが用意されており,この二つによって現地の状況を把握しながら救助活動を行う(写真12).
写真11 ロボット搭載カメラの映像

写真12 ヘリテレカメラの映像(写真右)
審査員席の右側に設置されているのがヘリテレカメラである.予選では,ヘリテレカメラの映像がデモンストレーションとして後ろのスクリーンに投影されていた.本選ではこれが重要なツールとなる.

予選と本選の違いは上記以外にもある.予選では各チームが交互に救助活動を行うが,本選では2チームずつ同時進行で救助活動を行う.がれきの除去や要救助者の発見などで,チームの枠を超えて連携する場面もあるそうだ.また,救出するダミヤンも本選では3体となり,そのうち1体はスタート時には隠されている.ライバル・チームとも助け合いながら,一刻も早く要救助者を発見・救出し,搬送しなければならない.レスキューの本質に迫る状況設定だといえよう.
東京予選には表1に示す6チームが出場したが,そのうち4チームがポイント0という結果に終わった.ロボット・ベースを出た途端に脱輪して機体が動かなくなったり,活動中に機体がフリーズしてしまったチームもあったが,ダミヤンに近づきながらもがれきをうまく処理できず,制限時間が経過してしまったチームもあり,手に汗握る展開の競技会だった.
表1 東京予選に出場した6チーム
*印の4チームが予選を突破した.獲得ポイントのほか,アイデアや連携力などを総合評価して決定された.
・ S.R.T.(湘南工科大学 ロボット技術研究会)*
・ MRF(明星大学)
・ 特別救助隊産技荒川隊(東京都立産業技術高等専門学校 荒川キャンパス)*
・ 長湫ボーダーズ(愛知工業大学)*
・ レスキューやらまいか(静岡大学 ロボットファクトリー)
個人的には,ダミヤンのセンサが過敏すぎるのではと感じるところもあった.レスキュー・ロボットの操縦は,ゲーム・コントローラを使い,無線LANを介して行っている.コントローラ操作と実際のロボットの動作にタイムラグが発生することも多く,力の微調整がうまくいかずダミヤンの苦痛を招いて,一時活動停止が宣言される場面も何回かあった.ただ,ダミヤンの先に生身の人間を見据えるとなると,センサ精度の良さは受け入れざるを得ないのかもしれない.なお,ダミヤンの開発を担当した方は,より人間に近づけようと並々ならぬ意欲を持って開発に当たったという.
レスキュー・ロボットの実現には多くの技術的な課題がある.例えば遠隔操縦技術,要救助者をやさしく扱う技術,複数のロボットを連携して動かす技術などである.それらの要素技術の集積が,本コンテストで体現されていると感じた.
2013年8月10~11日に行われた神戸における競技会本選では,MS-R(金沢工業大学 夢考房)がレスキュー工学大賞に輝いた.なお,来年の東京予選は,2014年7月6日,東京都立産業技術高等専門学校 荒川キャンパス(東京都荒川区)にて行われる予定である.レスキューロボットコンテスト実行委員会は,TwitterやFacebookでも情報を発信している.
いその・やすたか


