AUTOSARの目的とアーキテクチャ ―― 自動車業界に見る組み込みソフト開発効率化の取り組み(1)
本コラムでは,組み込み業界で注目を集めているわりにはその詳細が知られていない車載ソフトウェアの標準化活動「AUTOSAR(オートザー)」について紹介します.
連載第1回の今回は,AUTOSARの背景や目的,そのアーキテクチャについて説明します.
●主要自動車メーカが参加するコンソーシアム
AUTOSARは"The Automotive Open System Architecture"の略であり,自動車製造企業やサプライヤ企業(部品メーカ)を中心につくられたコンソーシアムです.これは2003年7月に設立され,その役割により,コア・パートナ,プレミアム・メンバ,アソシエート・メンバの3種類のメンバで構成されます.コンソーシアム発足当時のプレミアム・メンバはBMW社,Continental社,DaimlerChrysler社,Robert Bosch 社,Siemens VDO Automotive社であり,現在はトヨタ自動車を含む10社からなっています.自動車のECU(Electronic Control Unit;電子制御ユニット)については,AUTOSARの設立以前から,車載用OSであるOSEK(オーゼック)などによりある程度の標準化がなされてきました.しかし,現在の自動車は既に100個以上のECUを搭載したものもあり,標準化・共通化の要求はとどまるところを知りません.そこでAUTOSARでは,標準化をさらに押し進めて,アプリケーション・ソフトウェアがECUの違いを意識することなく使える環境を目指しています.
AUTOSARの目的と達成するべきゴールとして,以下の項目が挙げられます.
- E/E(Electric/Electronics)アーキテクチャの複雑度の管理
- 製品の変更,アップグレード,アップデート時の柔軟性の向上
- 製品ライン内,製品ラインを横断したソリューションのスケーラビリティ向上
- E/Eシステムの品質/信頼性の向上
●リアルタイム性確保を意識した階層アーキテクチャ
AUTOSARは図1のように階層化されたソフトウェア・アーキテクチャであり,上位層からアプリケーション層,AUTOSARランタイム環境(RTE:Runtime Environment),基本ソフトウェア(BSW)からなります.基本ソフトウェアはさらに,サービス層,ECU抽象化層,マイクロコントローラ抽象化層(MCAL:Micro Controller Abstraction Layer),複合ドライバから構成されます.
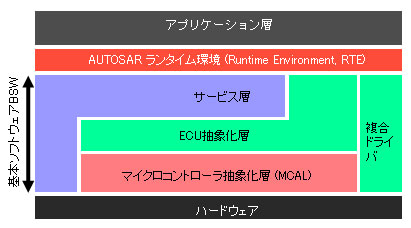
図1 AUTOSAR階層アーキテクチャ
図1から分かるように,基本ソフトウェアのサービス層は直接ハードウェアに,ECU抽象化層はRTEに接しています.複合ドライバと呼ばれる層は上下を貫いています.このあたりがリアルタイム性を要求される車載ソフトウェアをサポートするためにAUTOSARが苦労しているところです.
次回は,この階層化されたソフトウェア・アーキテクチャを利用して,実際のアプリケーション・ソフトウェアがどのようにRTE上に構成され,ECUの構成に従ってどのように設計を行っていくのかを説明します.


